Frame Transformer#
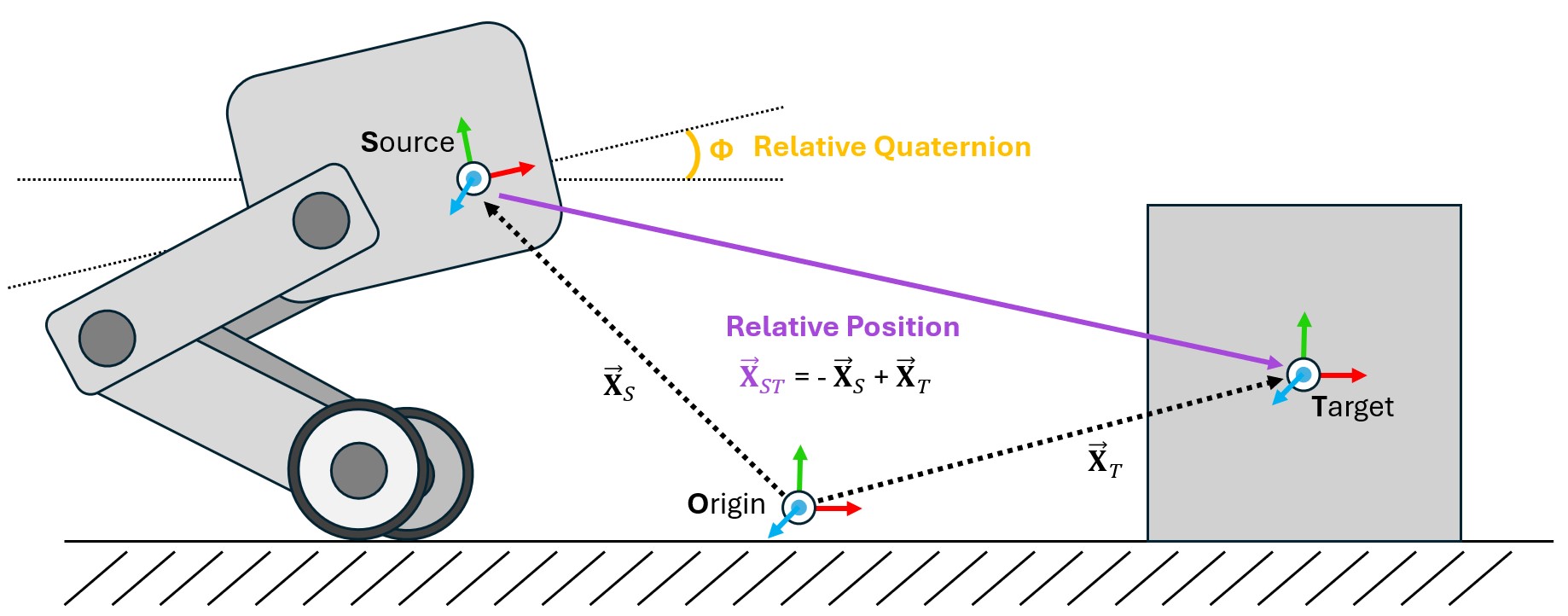
One of the most common operations that needs to be performed within a physics simulation is the frame transformation: rewriting a vector or quaternion in the basis of an arbitrary euclidean coordinate system. There are many ways to accomplish this within Isaac and USD, but these methods can be cumbersome to implement within Isaac Lab’s GPU based simulation and cloned environments. To mitigate this problem, we have designed the Frame Transformer Sensor, that tracks and calculate the relative frame transformations for rigid bodies of interest to the scene.
The sensory is minimally defined by a source frame and a list of target frames. These definitions take the form of a prim path (for the source) and list of regex capable prim paths the rigid bodies to be tracked (for the targets).
@configclass
class FrameTransformerSensorSceneCfg(InteractiveSceneCfg):
"""Design the scene with sensors on the robot."""
# ground plane
ground = AssetBaseCfg(prim_path="/World/defaultGroundPlane", spawn=sim_utils.GroundPlaneCfg())
# lights
dome_light = AssetBaseCfg(
prim_path="/World/Light", spawn=sim_utils.DomeLightCfg(intensity=3000.0, color=(0.75, 0.75, 0.75))
)
# robot
robot = ANYMAL_C_CFG.replace(prim_path="{ENV_REGEX_NS}/Robot")
# Rigid Object
cube = RigidObjectCfg(
prim_path="{ENV_REGEX_NS}/Cube",
spawn=sim_utils.CuboidCfg(
size=(1, 1, 1),
rigid_props=sim_utils.RigidBodyPropertiesCfg(),
mass_props=sim_utils.MassPropertiesCfg(mass=100.0),
collision_props=sim_utils.CollisionPropertiesCfg(),
physics_material=sim_utils.RigidBodyMaterialCfg(static_friction=1.0),
visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(0.0, 1.0, 0.0), metallic=0.2),
),
init_state=RigidObjectCfg.InitialStateCfg(pos=(5, 0, 0.5)),
)
specific_transforms = FrameTransformerCfg(
prim_path="{ENV_REGEX_NS}/Robot/base",
target_frames=[
FrameTransformerCfg.FrameCfg(prim_path="{ENV_REGEX_NS}/Robot/LF_FOOT"),
FrameTransformerCfg.FrameCfg(prim_path="{ENV_REGEX_NS}/Robot/RF_FOOT"),
],
debug_vis=True,
)
cube_transform = FrameTransformerCfg(
prim_path="{ENV_REGEX_NS}/Robot/base",
target_frames=[FrameTransformerCfg.FrameCfg(prim_path="{ENV_REGEX_NS}/Cube")],
debug_vis=False,
)
robot_transforms = FrameTransformerCfg(
prim_path="{ENV_REGEX_NS}/Robot/base",
target_frames=[FrameTransformerCfg.FrameCfg(prim_path="{ENV_REGEX_NS}/Robot/.*")],
We can now run the scene and query the sensor for data
def run_simulator(sim: sim_utils.SimulationContext, scene: InteractiveScene):
.
.
.
# Simulate physics
while simulation_app.is_running():
.
.
.
# print information from the sensors
print("-------------------------------")
print(scene["specific_transforms"])
print("relative transforms:", scene["specific_transforms"].data.target_pos_source)
print("relative orientations:", scene["specific_transforms"].data.target_quat_source)
print("-------------------------------")
print(scene["cube_transform"])
print("relative transform:", scene["cube_transform"].data.target_pos_source)
print("-------------------------------")
print(scene["robot_transforms"])
print("relative transforms:", scene["robot_transforms"].data.target_pos_source)
Let’s take a look at the result for tracking specific objects. First, we can take a look at the data coming from the sensors on the feet
-------------------------------
FrameTransformer @ '/World/envs/env_.*/Robot/base':
tracked body frames: ['base', 'LF_FOOT', 'RF_FOOT']
number of envs: 1
source body frame: base
target frames (count: ['LF_FOOT', 'RF_FOOT']): 2
relative transforms: tensor([[[ 0.4658, 0.3085, -0.4840],
[ 0.4487, -0.2959, -0.4828]]], device='cuda:0')
relative orientations: tensor([[[ 0.9623, 0.0072, -0.2717, -0.0020],
[ 0.9639, 0.0052, -0.2663, -0.0014]]], device='cuda:0')
By activating the visualizer, we can see that the frames of the feet are rotated “upward” slightly. We can also see the explicit relative positions and rotations by querying the sensor for data, which returns these values as a list with the same order as the tracked frames. This becomes even more apparent if we examine the transforms specified by regex.
-------------------------------
FrameTransformer @ '/World/envs/env_.*/Robot/base':
tracked body frames: ['base', 'LF_FOOT', 'LF_HIP', 'LF_SHANK', 'LF_THIGH', 'LH_FOOT', 'LH_HIP', 'LH_SHANK', 'LH_THIGH', 'RF_FOOT', 'RF_HIP', 'RF_SHANK', 'RF_THIGH', 'RH_FOOT', 'RH_HIP', 'RH_SHANK', 'RH_THIGH', 'base']
number of envs: 1
source body frame: base
target frames (count: ['LF_FOOT', 'LF_HIP', 'LF_SHANK', 'LF_THIGH', 'LH_FOOT', 'LH_HIP', 'LH_SHANK', 'LH_THIGH', 'RF_FOOT', 'RF_HIP', 'RF_SHANK', 'RF_THIGH', 'RH_FOOT', 'RH_HIP', 'RH_SHANK', 'RH_THIGH', 'base']): 17
relative transforms: tensor([[[ 4.6581e-01, 3.0846e-01, -4.8398e-01],
[ 2.9990e-01, 1.0400e-01, -1.7062e-09],
[ 2.1409e-01, 2.9177e-01, -2.4214e-01],
[ 3.5980e-01, 1.8780e-01, 1.2608e-03],
[-4.8813e-01, 3.0973e-01, -4.5927e-01],
[-2.9990e-01, 1.0400e-01, 2.7044e-09],
[-2.1495e-01, 2.9264e-01, -2.4198e-01],
[-3.5980e-01, 1.8780e-01, 1.5582e-03],
[ 4.4871e-01, -2.9593e-01, -4.8277e-01],
[ 2.9990e-01, -1.0400e-01, -2.7057e-09],
[ 1.9971e-01, -2.8554e-01, -2.3778e-01],
[ 3.5980e-01, -1.8781e-01, -9.1049e-04],
[-5.0090e-01, -2.9095e-01, -4.5746e-01],
[-2.9990e-01, -1.0400e-01, 6.3592e-09],
[-2.1860e-01, -2.8251e-01, -2.5163e-01],
[-3.5980e-01, -1.8779e-01, -1.8792e-03],
[ 0.0000e+00, 0.0000e+00, 0.0000e+00]]], device='cuda:0')
Here, the sensor is tracking all rigid body children of Robot/base, but this expression is inclusive, meaning that the source body itself is also a target. This can be seen both by examining the source and target list, where base appears twice, and also in the returned data, where the sensor returns the relative transform to itself, (0, 0, 0).
Code for frame_transformer_sensor.py
1# Copyright (c) 2022-2026, The Isaac Lab Project Developers (https://github.com/isaac-sim/IsaacLab/blob/main/CONTRIBUTORS.md).
2# All rights reserved.
3#
4# SPDX-License-Identifier: BSD-3-Clause
5
6import argparse
7
8from isaaclab.app import AppLauncher
9
10# add argparse arguments
11parser = argparse.ArgumentParser(description="Example on using the frame transformer sensor.")
12parser.add_argument("--num_envs", type=int, default=1, help="Number of environments to spawn.")
13# append AppLauncher cli args
14AppLauncher.add_app_launcher_args(parser)
15# demos should open Kit visualizer by default
16parser.set_defaults(visualizer=["kit"])
17# parse the arguments
18args_cli = parser.parse_args()
19
20# launch omniverse app
21app_launcher = AppLauncher(args_cli)
22simulation_app = app_launcher.app
23
24"""Rest everything follows."""
25
26import torch
27
28import isaaclab.sim as sim_utils
29from isaaclab.assets import AssetBaseCfg, RigidObjectCfg
30from isaaclab.scene import InteractiveScene, InteractiveSceneCfg
31from isaaclab.sensors import FrameTransformerCfg
32from isaaclab.utils.configclass import configclass
33
34##
35# Pre-defined configs
36##
37from isaaclab_assets.robots.anymal import ANYMAL_C_CFG # isort: skip
38
39
40@configclass
41class FrameTransformerSensorSceneCfg(InteractiveSceneCfg):
42 """Design the scene with sensors on the robot."""
43
44 # ground plane
45 ground = AssetBaseCfg(prim_path="/World/defaultGroundPlane", spawn=sim_utils.GroundPlaneCfg())
46
47 # lights
48 dome_light = AssetBaseCfg(
49 prim_path="/World/Light", spawn=sim_utils.DomeLightCfg(intensity=3000.0, color=(0.75, 0.75, 0.75))
50 )
51
52 # robot
53 robot = ANYMAL_C_CFG.replace(prim_path="{ENV_REGEX_NS}/Robot")
54
55 # Rigid Object
56 cube = RigidObjectCfg(
57 prim_path="{ENV_REGEX_NS}/Cube",
58 spawn=sim_utils.CuboidCfg(
59 size=(1, 1, 1),
60 rigid_props=sim_utils.RigidBodyPropertiesCfg(),
61 mass_props=sim_utils.MassPropertiesCfg(mass=100.0),
62 collision_props=sim_utils.CollisionPropertiesCfg(),
63 physics_material=sim_utils.RigidBodyMaterialCfg(static_friction=1.0),
64 visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(0.0, 1.0, 0.0), metallic=0.2),
65 ),
66 init_state=RigidObjectCfg.InitialStateCfg(pos=(5, 0, 0.5)),
67 )
68
69 specific_transforms = FrameTransformerCfg(
70 prim_path="{ENV_REGEX_NS}/Robot/base",
71 target_frames=[
72 FrameTransformerCfg.FrameCfg(prim_path="{ENV_REGEX_NS}/Robot/LF_FOOT"),
73 FrameTransformerCfg.FrameCfg(prim_path="{ENV_REGEX_NS}/Robot/RF_FOOT"),
74 ],
75 debug_vis=True,
76 )
77
78 cube_transform = FrameTransformerCfg(
79 prim_path="{ENV_REGEX_NS}/Robot/base",
80 target_frames=[FrameTransformerCfg.FrameCfg(prim_path="{ENV_REGEX_NS}/Cube")],
81 debug_vis=False,
82 )
83
84 robot_transforms = FrameTransformerCfg(
85 prim_path="{ENV_REGEX_NS}/Robot/base",
86 target_frames=[FrameTransformerCfg.FrameCfg(prim_path="{ENV_REGEX_NS}/Robot/.*")],
87 debug_vis=False,
88 )
89
90
91def run_simulator(sim: sim_utils.SimulationContext, scene: InteractiveScene):
92 """Run the simulator."""
93 # Define simulation stepping
94 sim_dt = sim.get_physics_dt()
95 sim_time = 0.0
96 count = 0
97
98 # Simulate physics
99 while simulation_app.is_running():
100 if count % 500 == 0:
101 # reset counter
102 count = 0
103 # reset the scene entities
104 # root state
105 # we offset the root state by the origin since the states are written in simulation world frame
106 # if this is not done, then the robots will be spawned at the (0, 0, 0) of the simulation world
107 root_pose = scene["robot"].data.default_root_pose.torch.clone()
108 root_pose[:, :3] += scene.env_origins
109 scene["robot"].write_root_pose_to_sim_index(root_pose=root_pose)
110 root_vel = scene["robot"].data.default_root_vel.torch.clone()
111 scene["robot"].write_root_velocity_to_sim_index(root_velocity=root_vel)
112 # set joint positions with some noise
113 joint_pos, joint_vel = (
114 scene["robot"].data.default_joint_pos.torch.clone(),
115 scene["robot"].data.default_joint_vel.torch.clone(),
116 )
117 joint_pos += torch.rand_like(joint_pos) * 0.1
118 scene["robot"].write_joint_position_to_sim_index(position=joint_pos)
119 scene["robot"].write_joint_velocity_to_sim_index(velocity=joint_vel)
120 # clear internal buffers
121 scene.reset()
122 print("[INFO]: Resetting robot state...")
123 # Apply default actions to the robot
124 # -- generate actions/commands
125 targets = scene["robot"].data.default_joint_pos.torch
126 # -- apply action to the robot
127 scene["robot"].set_joint_position_target_index(target=targets)
128 # -- write data to sim
129 scene.write_data_to_sim()
130 # perform step
131 sim.step()
132 # update sim-time
133 sim_time += sim_dt
134 count += 1
135 # update buffers
136 scene.update(sim_dt)
137
138 # print information from the sensors
139 print("-------------------------------")
140 print(scene["specific_transforms"])
141 print("relative transforms:", scene["specific_transforms"].data.target_pos_source)
142 print("relative orientations:", scene["specific_transforms"].data.target_quat_source)
143 print("-------------------------------")
144 print(scene["cube_transform"])
145 print("relative transform:", scene["cube_transform"].data.target_pos_source)
146 print("-------------------------------")
147 print(scene["robot_transforms"])
148 print("relative transforms:", scene["robot_transforms"].data.target_pos_source)
149
150
151def main():
152 """Main function."""
153
154 # Initialize the simulation context
155 sim_cfg = sim_utils.SimulationCfg(dt=0.005, device=args_cli.device)
156 sim = sim_utils.SimulationContext(sim_cfg)
157 # Set main camera
158 sim.set_camera_view(eye=[3.5, 3.5, 3.5], target=[0.0, 0.0, 0.0])
159 # design scene
160 scene_cfg = FrameTransformerSensorSceneCfg(num_envs=args_cli.num_envs, env_spacing=2.0)
161 scene = InteractiveScene(scene_cfg)
162 # Play the simulator
163 sim.reset()
164 # Now we are ready!
165 print("[INFO]: Setup complete...")
166 # Run the simulator
167 run_simulator(sim, scene)
168
169
170if __name__ == "__main__":
171 # run the main function
172 main()
173 # close sim app
174 simulation_app.close()