Visuo-Tactile Sensor#
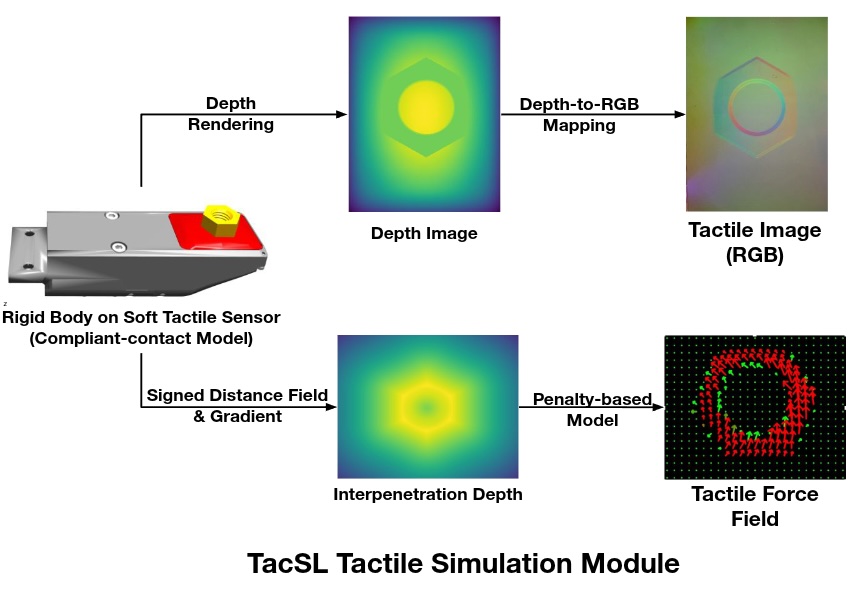
The visuo-tactile sensor in Isaac Lab provides realistic tactile feedback through integration with TacSL (Tactile Sensor Learning) [Akinola2025]. It is designed to simulate high-fidelity tactile interactions, generating both visual and force-based data that mirror real-world tactile sensors like GelSight devices. The sensor can provide tactile RGB images, force field distributions, and other intermediate tactile measurements essential for robotic manipulation tasks requiring fine tactile feedback.
Configuration#
Tactile sensors require specific configuration parameters to define their behavior and data collection properties. The sensor can be configured with various parameters including sensor resolution, force sensitivity, and output data types.
from isaaclab.sensors import TiledCameraCfg
from isaaclab_assets.sensors import GELSIGHT_R15_CFG
import isaaclab.sim as sim_utils
from isaaclab_contrib.sensors.tacsl_sensor import VisuoTactileSensorCfg
# Tactile sensor configuration
tactile_sensor = VisuoTactileSensorCfg(
prim_path="{ENV_REGEX_NS}/Robot/elastomer/tactile_sensor",
## Sensor configuration
render_cfg=GELSIGHT_R15_CFG,
enable_camera_tactile=True,
enable_force_field=True,
## Elastomer configuration
tactile_array_size=(20, 25),
tactile_margin=0.003,
## Contact object configuration
contact_object_prim_path_expr="{ENV_REGEX_NS}/contact_object",
## Force field physics parameters
normal_contact_stiffness=1.0,
friction_coefficient=2.0,
tangential_stiffness=0.1,
## Camera configuration
camera_cfg=TiledCameraCfg(
prim_path="{ENV_REGEX_NS}/Robot/elastomer_tip/cam",
update_period=1 / 60, # 60 Hz
height=320,
width=240,
data_types=["distance_to_image_plane"],
spawn=None, # camera already spawned in USD file
),
)
The configuration supports customization of:
Render Configuration: Specify the GelSight sensor rendering parameters using predefined configs (e.g.,
GELSIGHT_R15_CFG,GELSIGHT_MINI_CFGfromisaaclab_assets.sensors)- Tactile Modalities:
enable_camera_tactile- Enable tactile RGB imaging through camera sensorsenable_force_field- Enable force field computation and visualization
Force Field Grid: Set tactile grid dimensions (
tactile_array_size) and margins, which directly affects the spatial resolution of the computed force fieldContact Object Configuration: Define properties of interacting objects using prim path expressions to locate objects with SDF collision meshes
- Physics Parameters: Control the sensor’s force field computation:
normal_contact_stiffness,friction_coefficient,tangential_stiffness- Normal stiffness, friction coefficient, and tangential stiffness
- Camera Settings: Configure resolution, update rates, and data types, currently only
distance_to_image_plane(alias fordepth) is supported. spawnis set toNoneby default, which means that the camera is already spawned in the USD file. If you want to spawn the camera yourself and set focal length, etc., you can set the spawn configuration to a valid spawn configuration.
- Camera Settings: Configure resolution, update rates, and data types, currently only
Configuration Requirements#
Important
The following requirements must be satisfied for proper sensor operation:
- Camera Tactile Imaging
If
enable_camera_tactile=True, a validcamera_cfg(TiledCameraCfg) must be provided with appropriate camera parameters.- Force Field Computation
If
enable_force_field=True, the following parameters are required:contact_object_prim_path_expr- Prim path expression to locate contact objects with SDF collision meshes
- SDF Computation
When force field computation is enabled, penalty-based normal and shear forces are computed using Signed Distance Field (SDF) queries. To achieve GPU acceleration:
Interacting objects should have SDF collision meshes
An SDFView must be defined during initialization, therefore interacting objects should be specified before simulation.
- Elastomer Configuration
The sensor’s
prim_pathmust be configured as a child of the elastomer prim in the USD hierarchy. The query points for the force field computation is computed from the surface of the elastomer mesh, which is searched for under the prim path of the elastomer.- Physics Materials
The sensor uses physics materials to configure the compliant contact properties of the elastomer. By default, physics material properties are pre-configured in the USD asset. However, you can override these properties by specifying the following parameters in
UsdFileWithCompliantContactCfgwhen spawning the robot:compliant_contact_stiffness- Contact stiffness for the elastomer surfacecompliant_contact_damping- Contact damping for the elastomer surfacephysics_material_prim_path- Prim path where physics material is applied (typically"elastomer")
If any parameter is set to
None, the corresponding property from the USD asset will be retained.
Usage Example#
To use the tactile sensor in a simulation environment, run the demo:
cd scripts/demos/sensors
python tacsl_sensor.py --use_tactile_rgb --use_tactile_ff --tactile_compliance_stiffness 100.0 --tactile_compliant_damping 1.0 --contact_object_type nut --num_envs 16 --save_viz --enable_cameras
Available command-line options include:
--use_tactile_rgb: Enable camera-based tactile sensing--use_tactile_ff: Enable force field tactile sensing--contact_object_type: Specify the type of contact object (nut, cube, etc.)--num_envs: Number of parallel environments--save_viz: Save visualization outputs for analysis--tactile_compliance_stiffness: Override compliant contact stiffness (default: use USD asset values)--tactile_compliant_damping: Override compliant contact damping (default: use USD asset values)--normal_contact_stiffness: Normal contact stiffness for force field computation--tangential_stiffness: Tangential stiffness for shear forces--friction_coefficient: Friction coefficient for shear forces--debug_sdf_closest_pts: Visualize closest SDF points for debugging--debug_tactile_sensor_pts: Visualize tactile sensor points for debugging--trimesh_vis_tactile_points: Enable trimesh-based visualization of tactile points
For a complete list of available options:
python tacsl_sensor.py -h
Note
The demo examples are based on the Gelsight R1.5, which is a prototype sensor that is now discontinued. The same procedure can be adapted for other visuotactile sensors.

The tactile sensor supports multiple data modalities that provide comprehensive information about contact interactions:
Output Tactile Data#
- RGB Tactile Images
Real-time generation of tactile RGB images as objects make contact with the sensor surface. These images show deformation patterns and contact geometry similar to gel-based tactile sensors [Si2022]
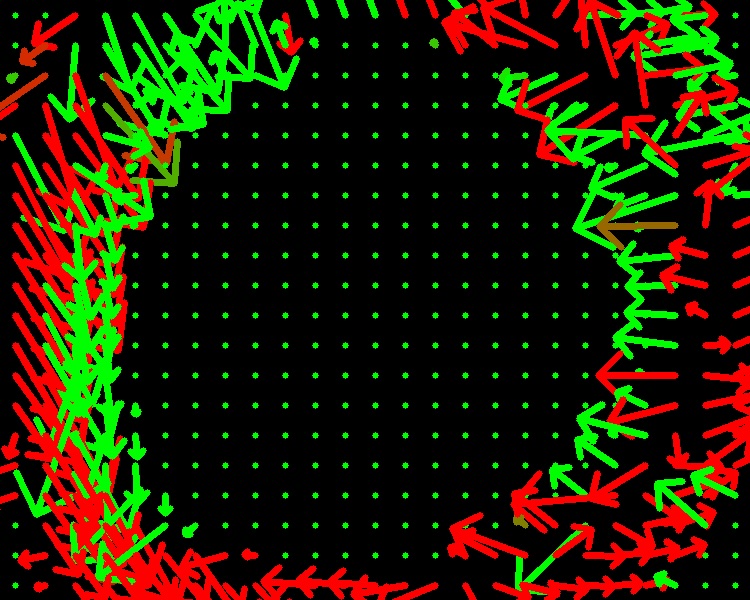
- Force Fields
Detailed contact force field and pressure distributions across the sensor surface, including normal and shear components.

|
|
Integration with Learning Frameworks#
The tactile sensor is designed to integrate seamlessly with reinforcement learning and imitation learning frameworks. The structured tensor outputs can be directly used as observations in learning algorithms:
def get_tactile_observations(self):
"""Extract tactile observations for learning."""
tactile_data = self.scene["tactile_sensor"].data
# tactile RGB image
tactile_rgb = tactile_data.tactile_rgb_image
# tactile depth image
tactile_depth = tactile_data.tactile_depth_image
# force field
tactile_normal_force = tactile_data.tactile_normal_force
tactile_shear_force = tactile_data.tactile_shear_force
return [tactile_rgb, tactile_depth, tactile_normal_force, tactile_shear_force]
References#
Akinola, I., Xu, J., Carius, J., Fox, D., & Narang, Y. (2025). TacSL: A library for visuotactile sensor simulation and learning. IEEE Transactions on Robotics.
Si, Z., & Yuan, W. (2022). Taxim: An example-based simulation model for GelSight tactile sensors. IEEE Robotics and Automation Letters, 7(2), 2361-2368.