Available Environments#
The following lists comprises of all the RL and IL tasks implementations that are available in Isaac Lab. While we try to keep this list up-to-date, you can always get the latest list of environments by running the following command:
Note
Use --keyword <search_term> (optional) to filter environments by keyword.
./isaaclab.sh -p scripts/environments/list_envs.py --keyword <search_term>
Note
Use --keyword <search_term> (optional) to filter environments by keyword.
isaaclab.bat -p scripts\environments\list_envs.py --keyword <search_term>
We are actively working on adding more environments to the list. If you have any environments that you would like to add to Isaac Lab, please feel free to open a pull request!
Single-agent#
Classic#
Classic environments that are based on IsaacGymEnvs implementation of MuJoCo-style environments.
World |
Environment ID |
Description |
|---|---|---|
|
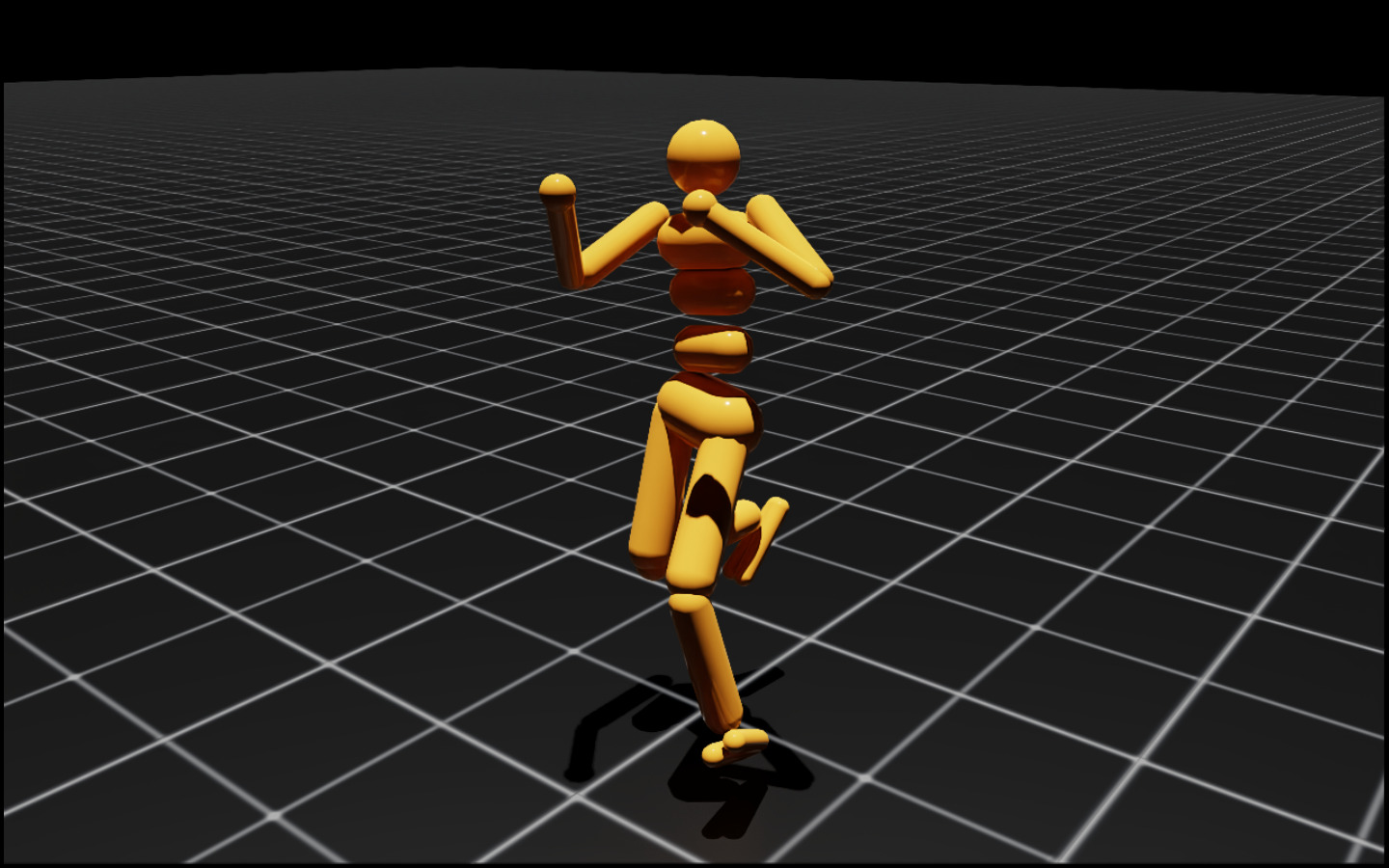
Move towards a direction with the MuJoCo humanoid robot |
|
|
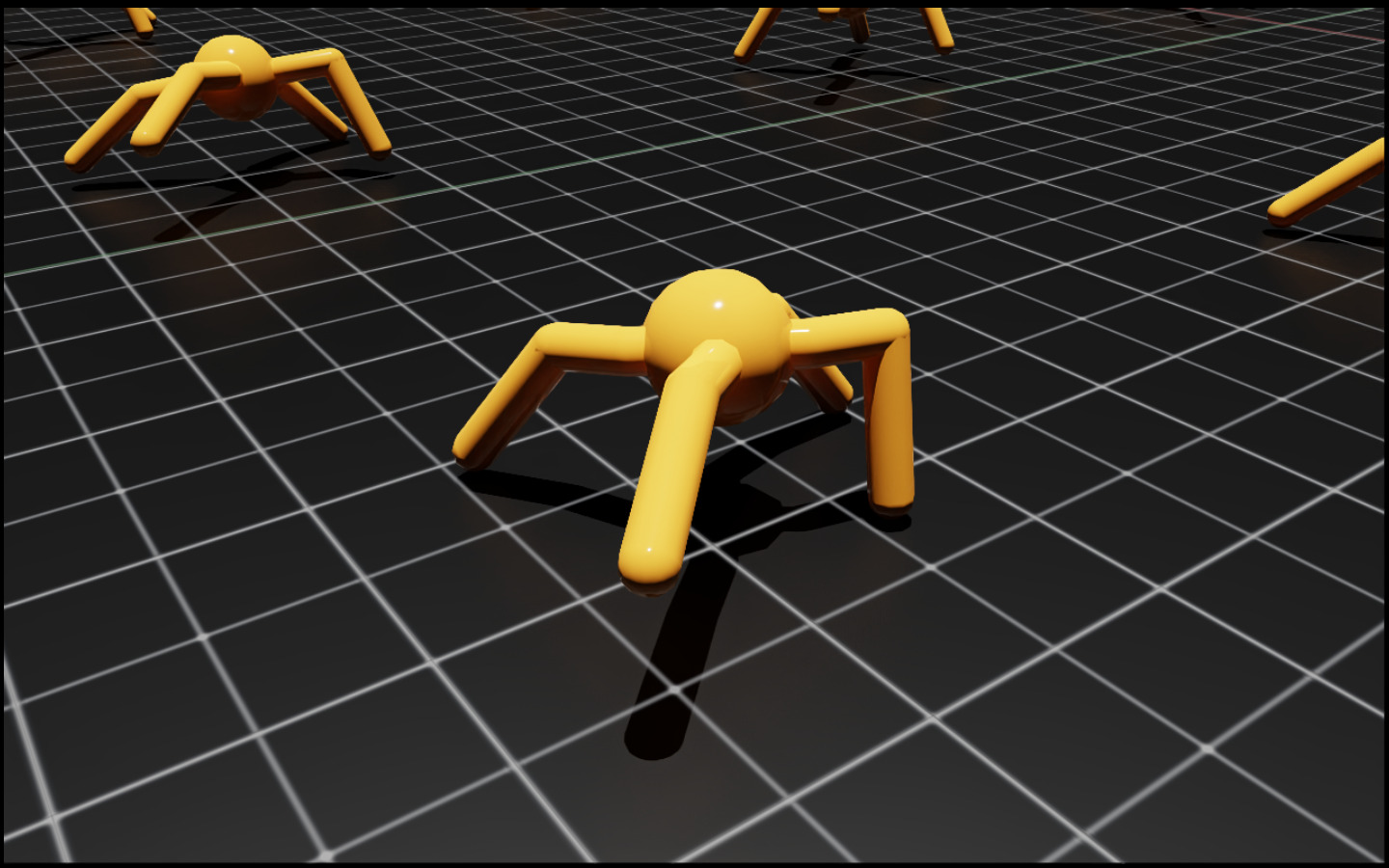
Move towards a direction with the MuJoCo ant robot |
|
|
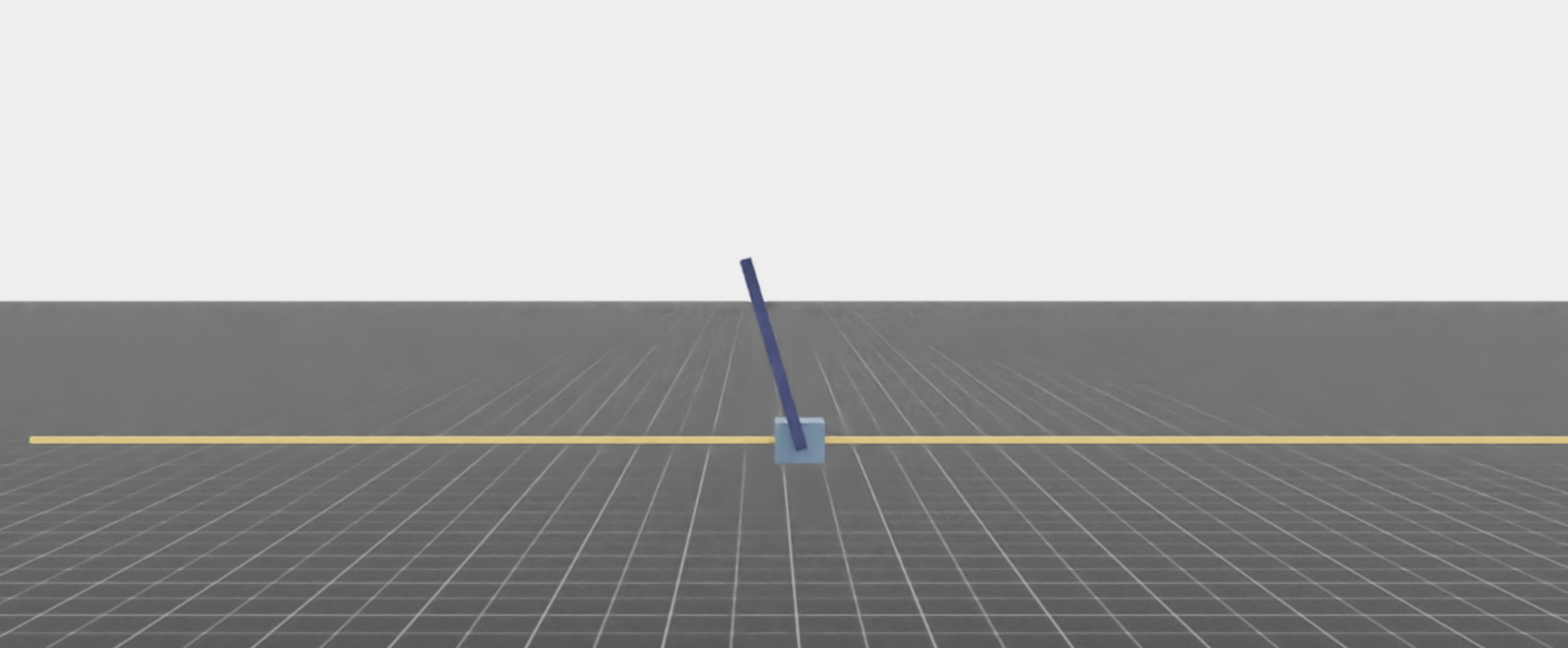
Move the cart to keep the pole upwards in the classic cartpole control |
|
|
Move the cart to keep the pole upwards in the classic cartpole control
and perceptive inputs. Requires running with |
|
|
Move the cart to keep the pole upwards in the classic cartpole control
based off of features extracted from perceptive inputs with pre-trained
frozen vision encoders. Requires running with |
Manipulation#
Environments based on fixed-arm manipulation tasks.
For many of these tasks, we include configurations with different arm action spaces. For example, for the lift-cube environment:
Isaac-Lift-Cube-Franka-v0: Franka arm with joint position control
Isaac-Lift-Cube-Franka-IK-Abs-v0: Franka arm with absolute IK control
Isaac-Lift-Cube-Franka-IK-Rel-v0: Franka arm with relative IK control
World |
Environment ID |
Description |
|---|---|---|
|
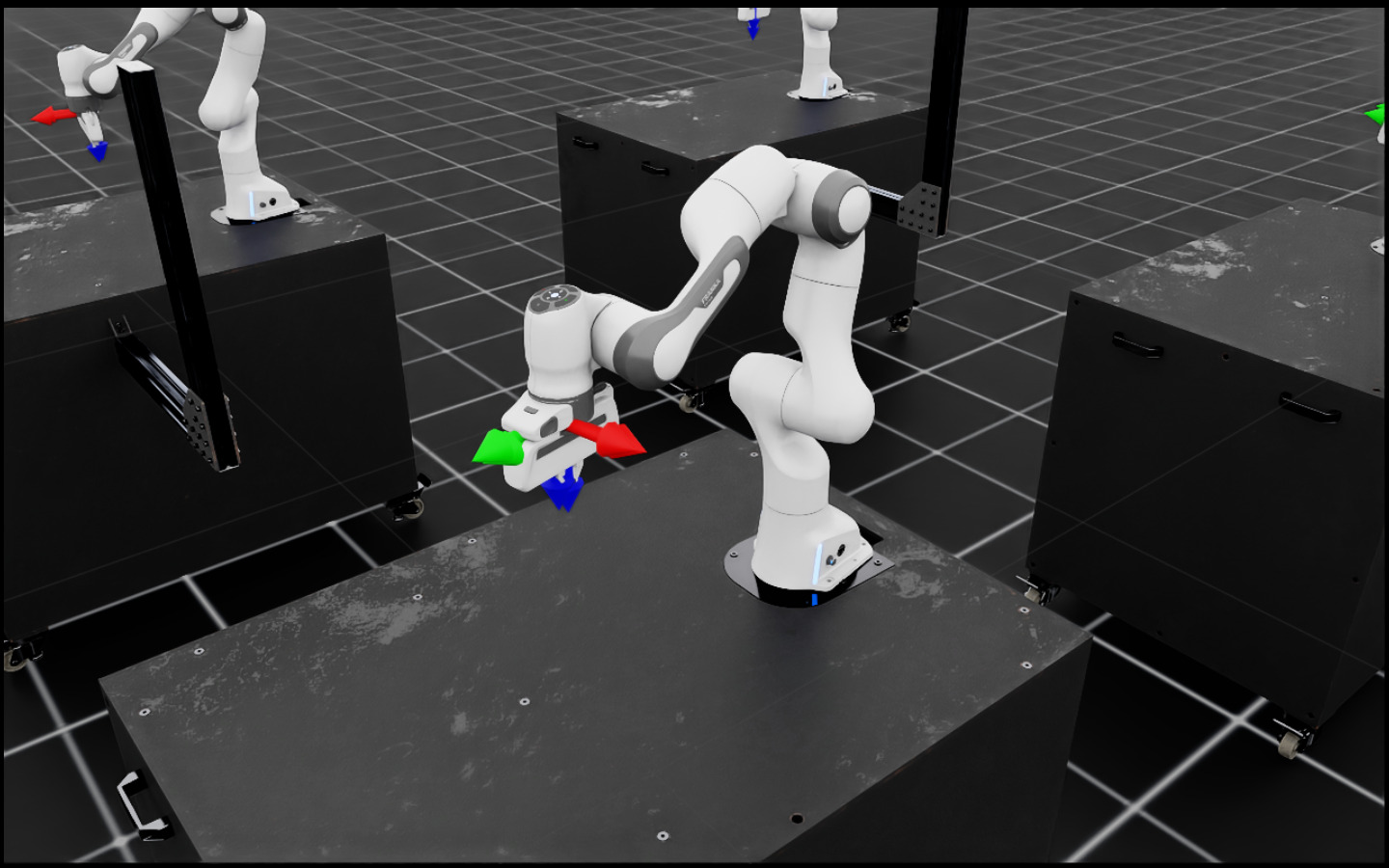
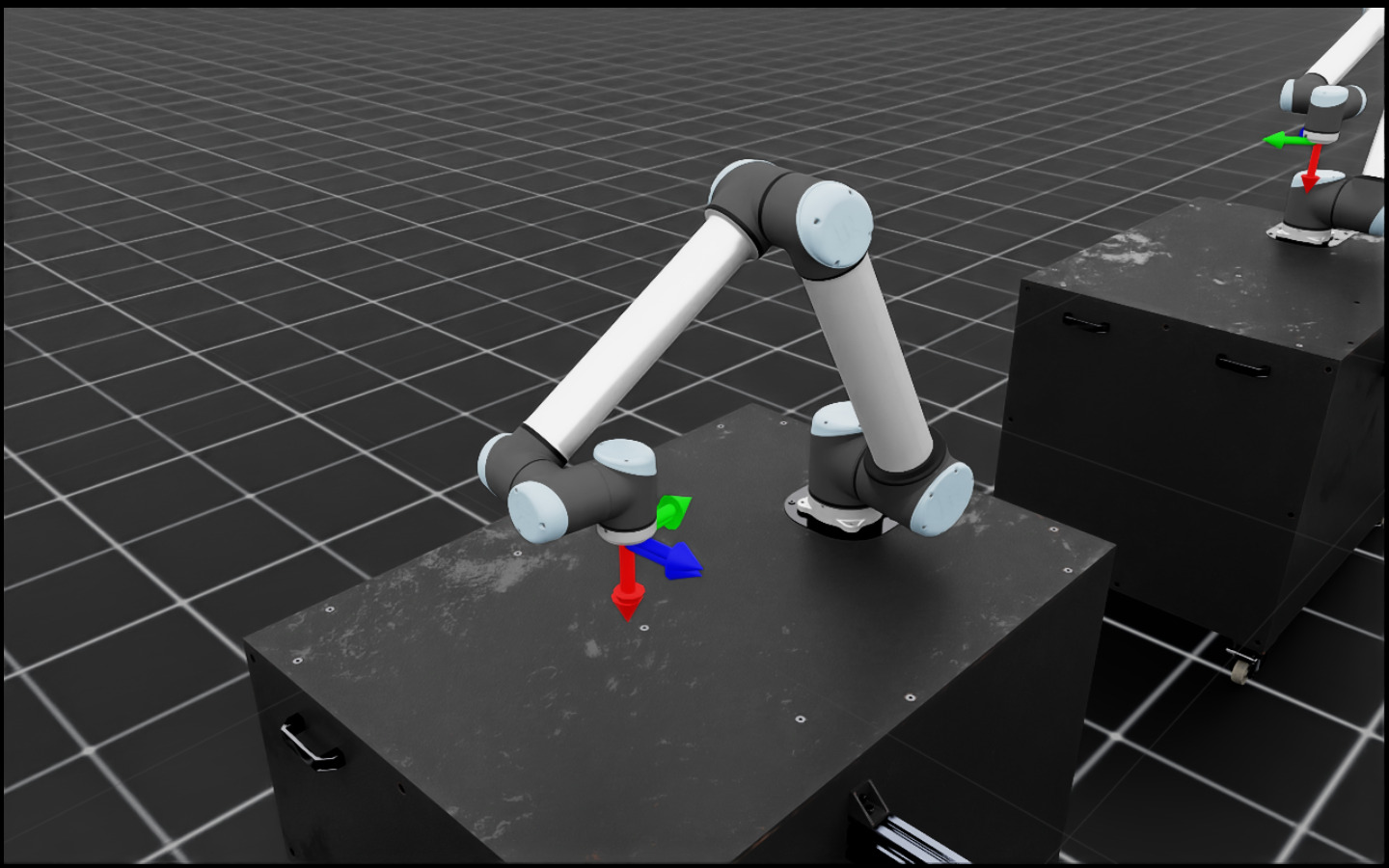
Move the end-effector to a sampled target pose with the Franka robot |
|
|
Move the end-effector to a sampled target pose with the UR10 robot |
|
|
Move the end-effector to a sampled target pose with the UR10e robot This policy has been deployed to a real robot |
|
|
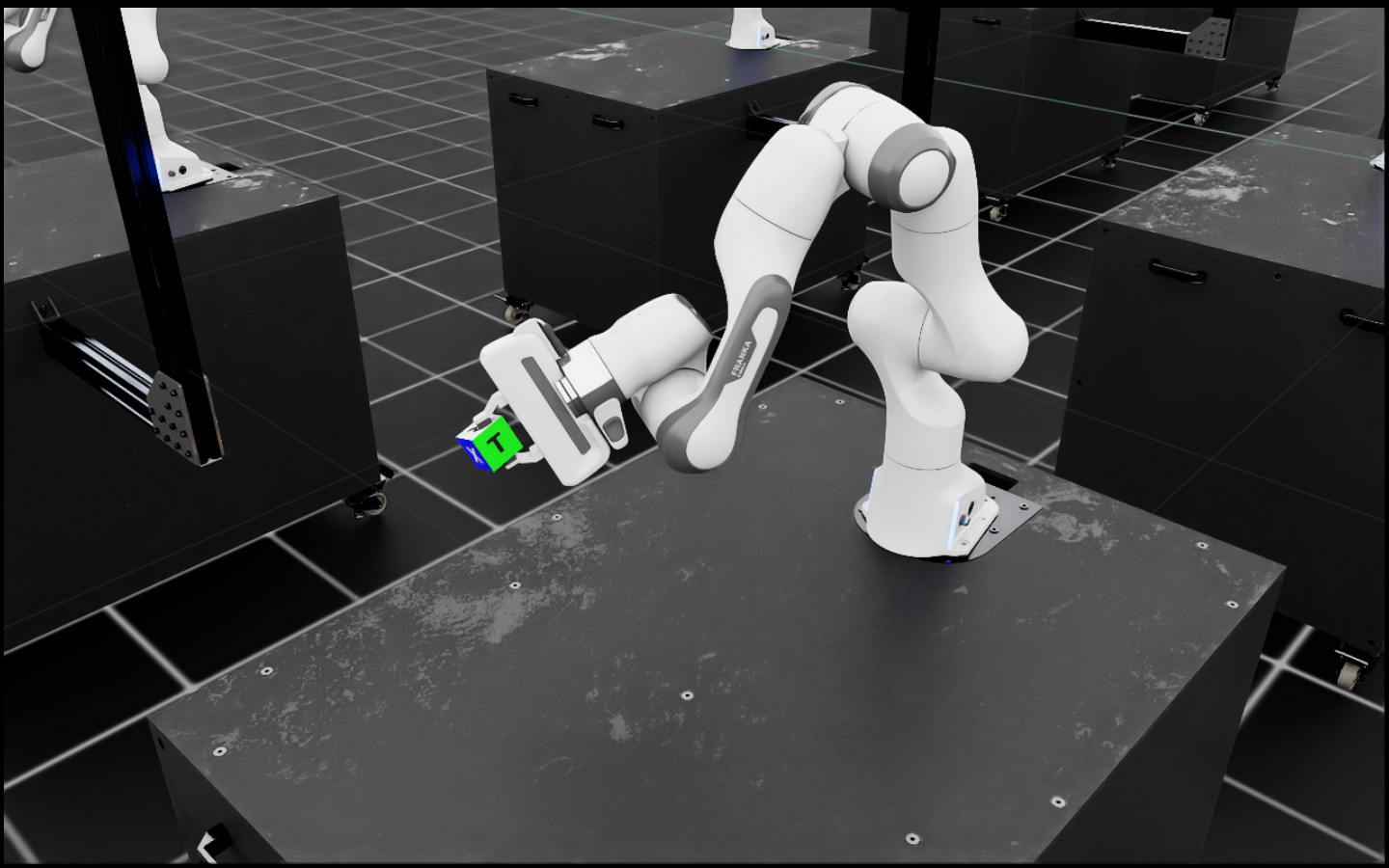
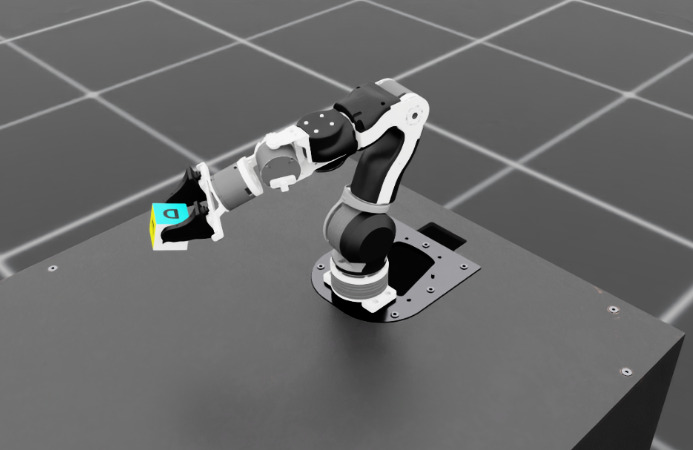
Pick a cube and bring it to a sampled target position with the Franka robot |
|
|
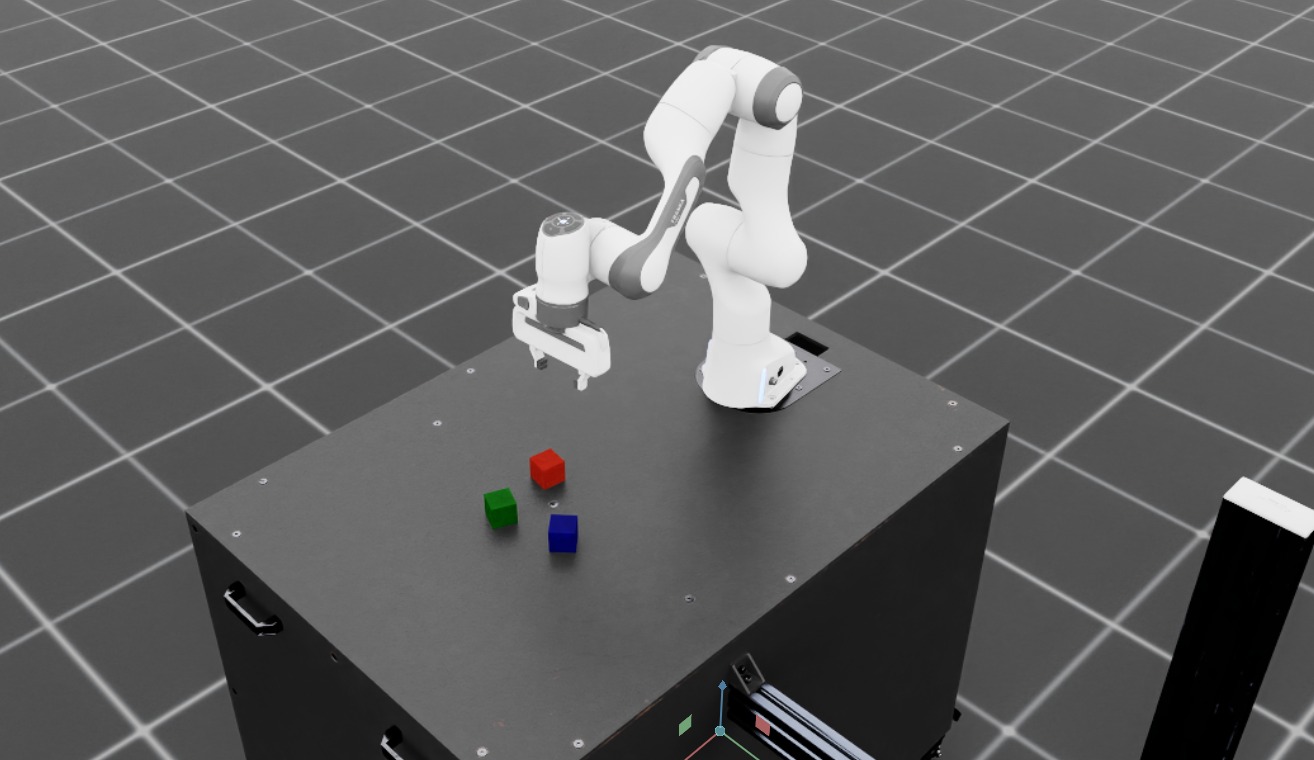
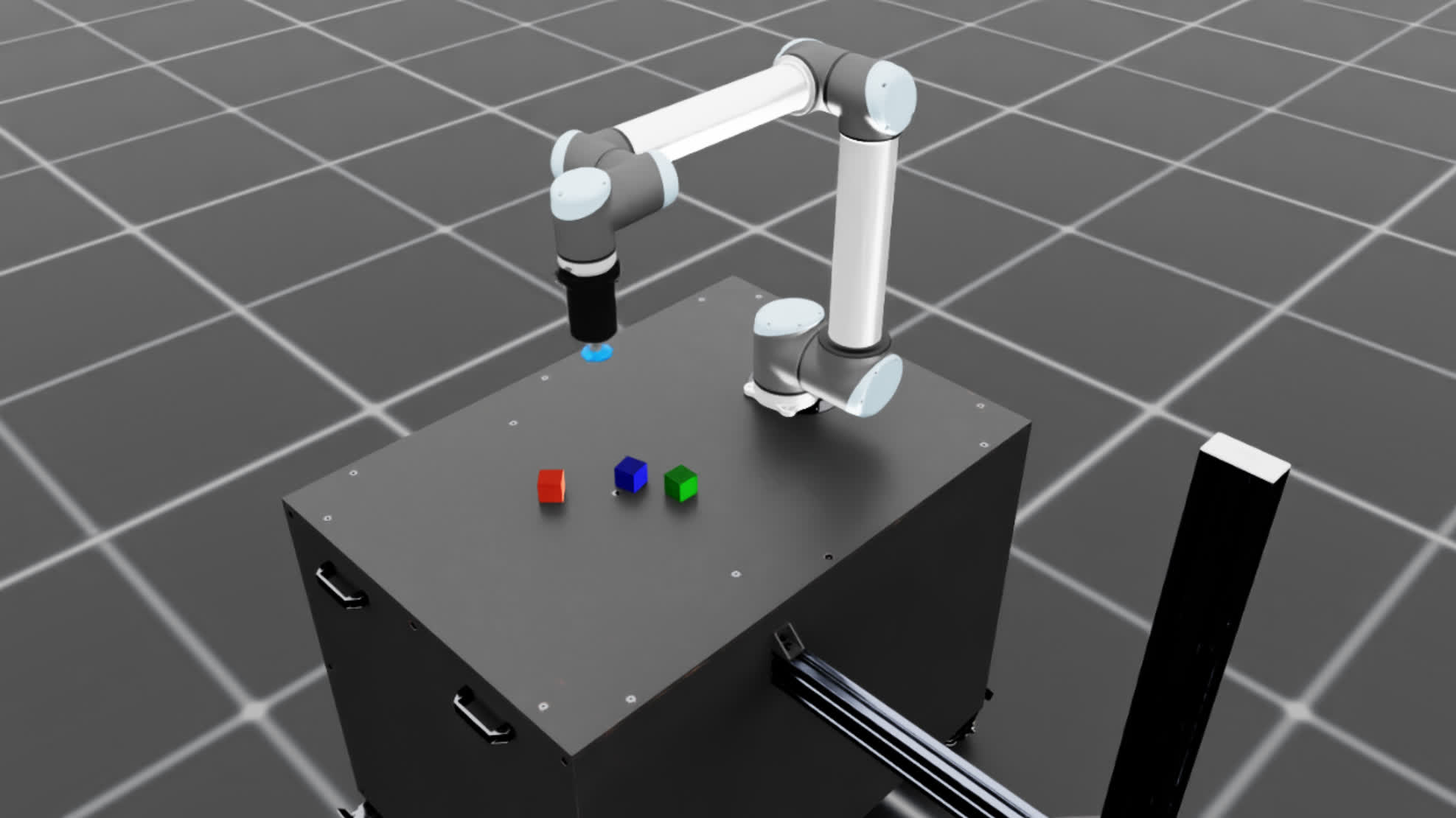
Stack three cubes (bottom to top: blue, red, green) with the Franka robot. Blueprint env used for the NVIDIA Isaac GR00T blueprint for synthetic manipulation motion generation |
|
|
Stack three cubes (bottom to top: blue, red, green) with the UR10 arm and long surface gripper or short surface gripper. |
|
|
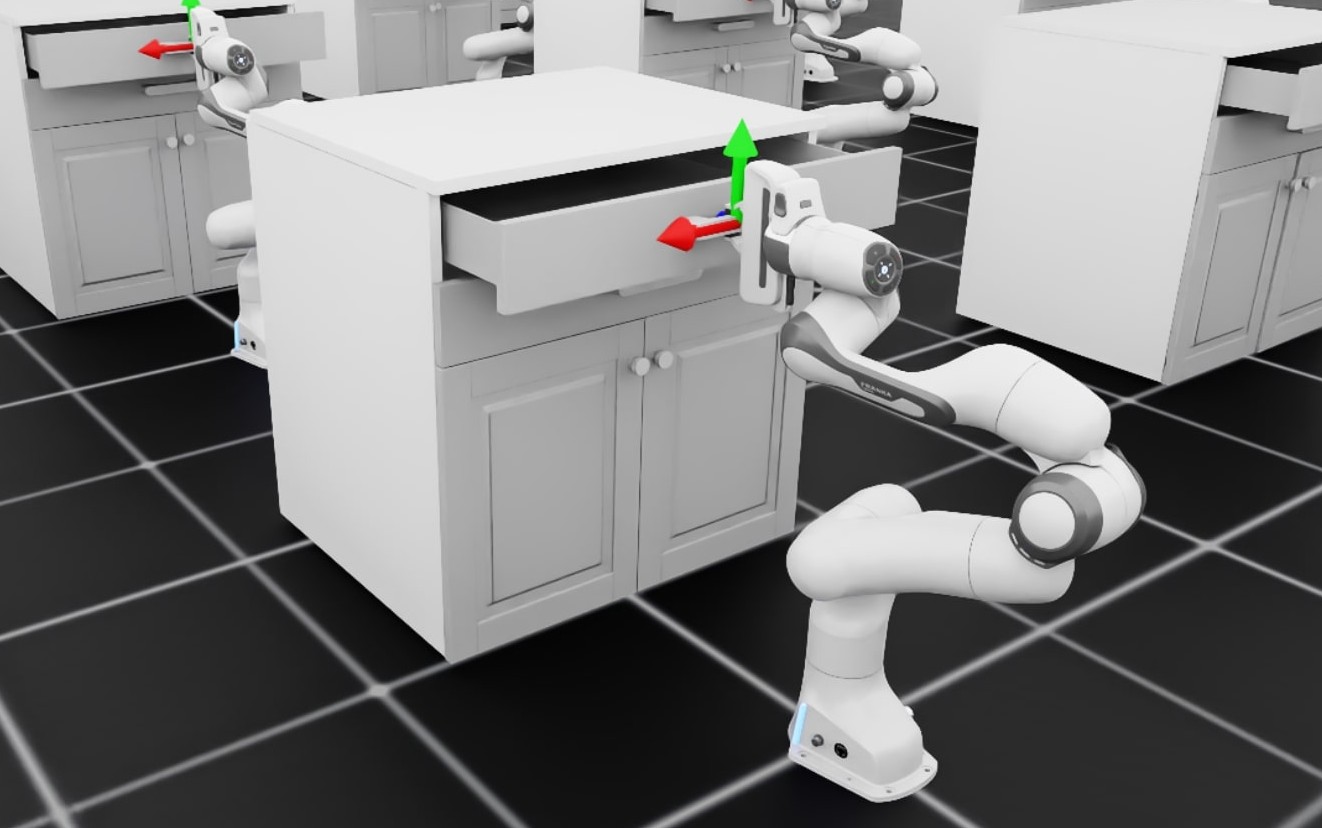
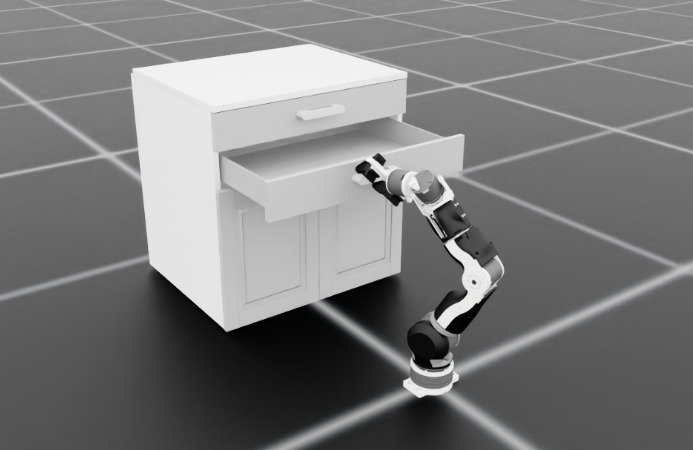
Grasp the handle of a cabinet’s drawer and open it with the Franka robot |
|
|
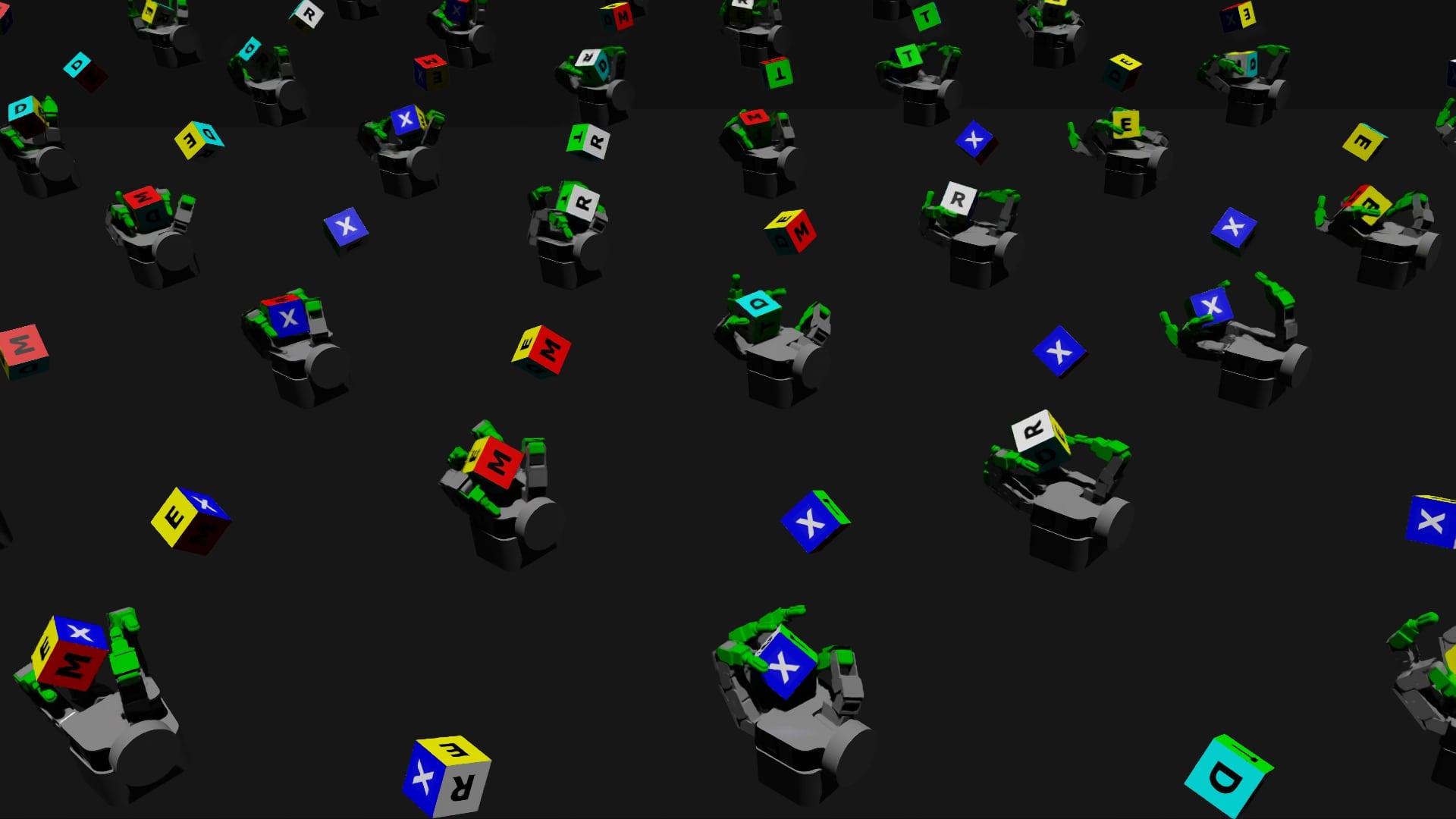
In-hand reorientation of a cube using Allegro hand |
|
|
Isaac-Repose-Cube-Shadow-Direct-v0 |
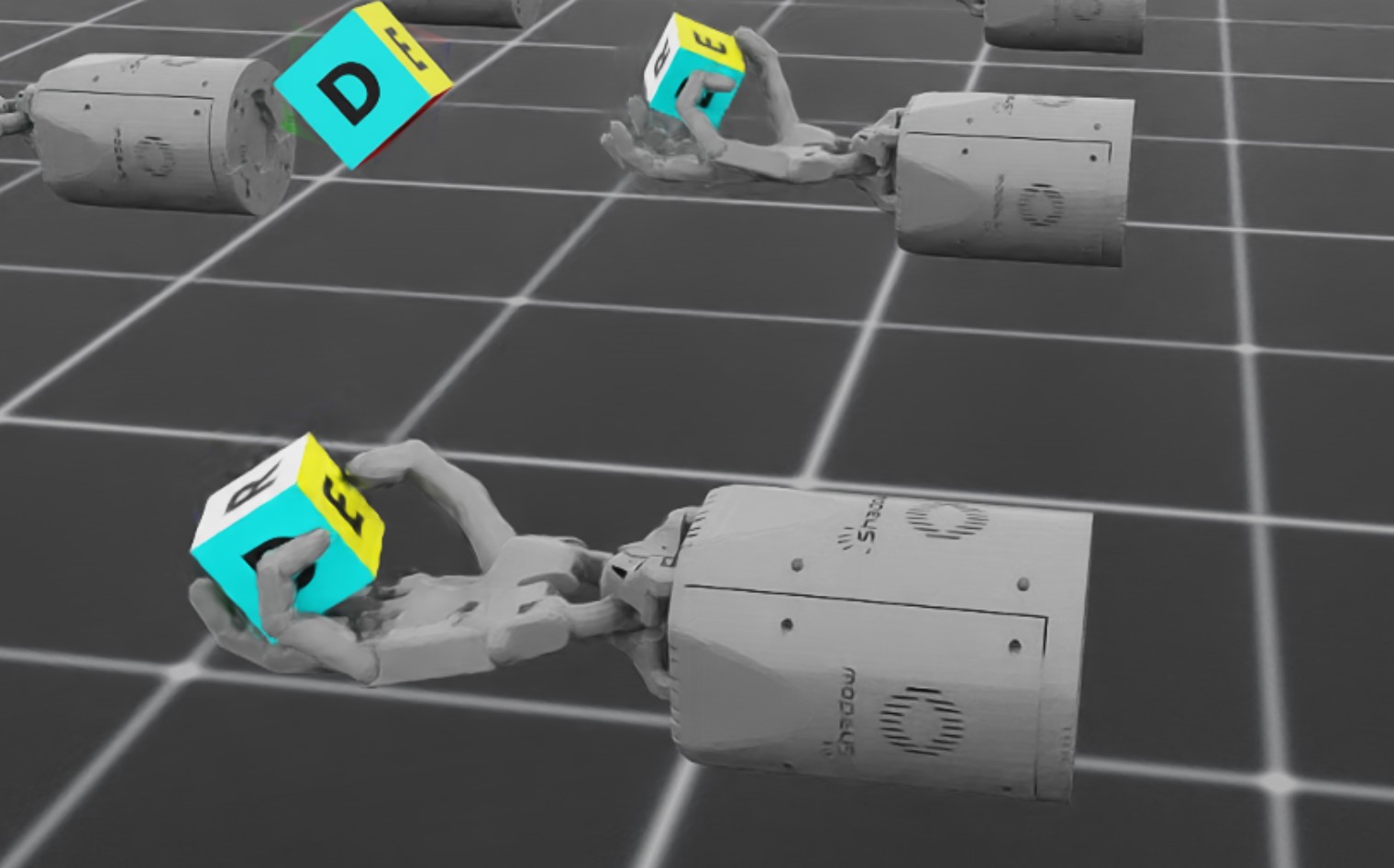
In-hand reorientation of a cube using Shadow hand |
|
In-hand reorientation of a cube using Shadow hand using perceptive inputs.
Requires running with |
|
|
Pick up and place an object in a basket with a GR-1 humanoid robot |
|
|
Pick up and place an object in a basket with a GR-1 humanoid robot with waist degrees-of-freedom enables that provides a wider reach space. |
|
|
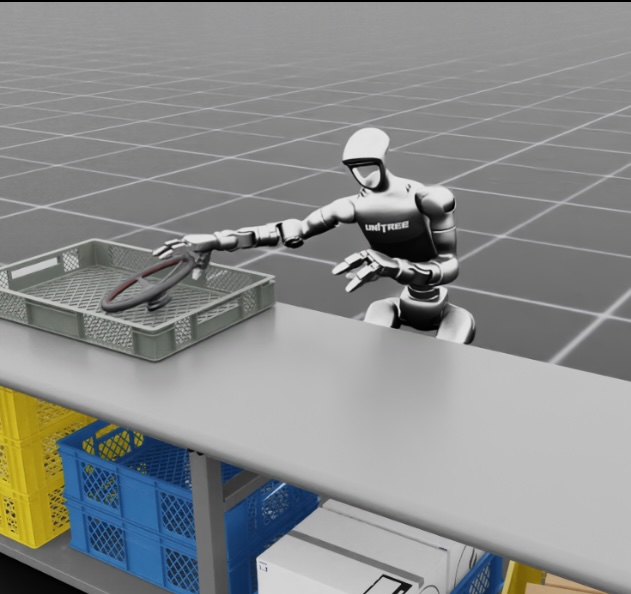
Pick up and place an object in a basket with a Unitree G1 humanoid robot |
|
|
Pick up and place an object in a basket with a Unitree G1 humanoid robot with three-fingered hands. Robot is set up with the base fixed in place. |
|
|
Pick up and place an object in a basket with a Unitree G1 humanoid robot with three-fingered hands and in-place locomanipulation capabilities enabled (i.e. Robot lower body balances in-place while upper body is controlled via Inverse Kinematics). |
|
|
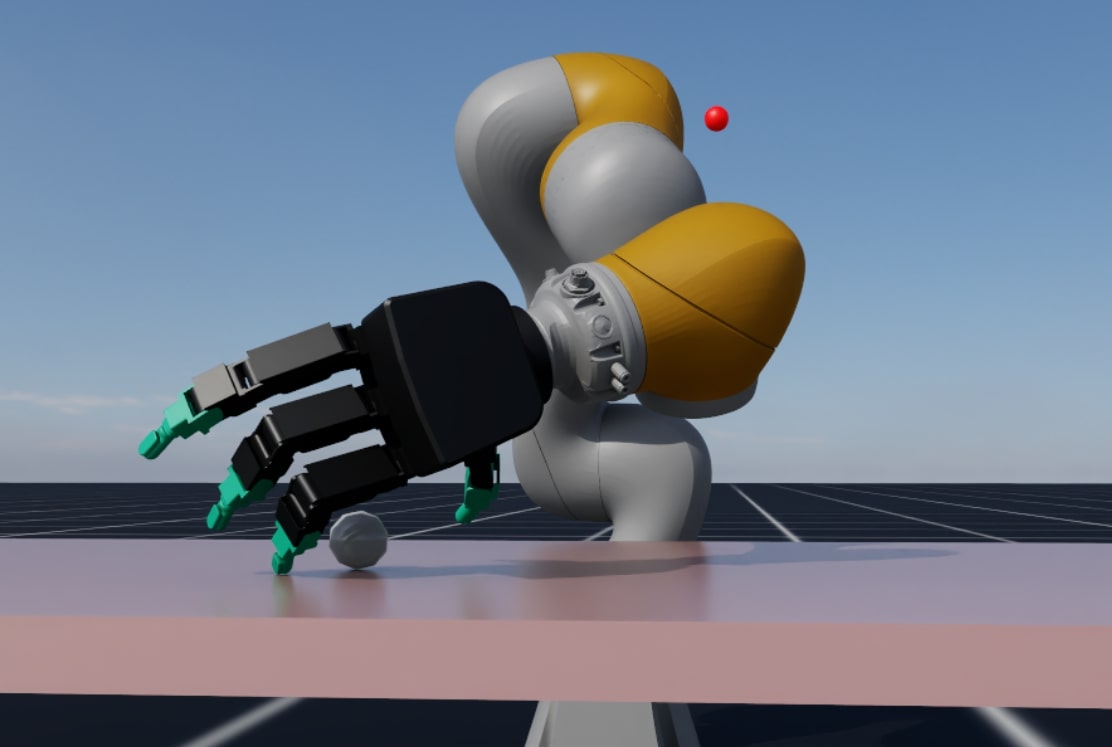
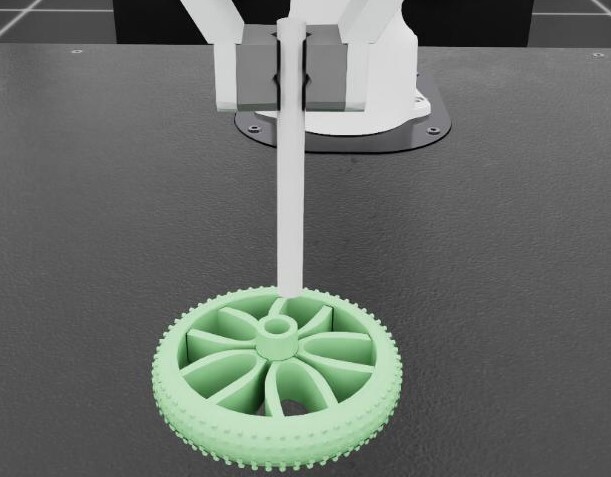
Pick up a primitive shape on the table and lift it to target position |
|
|
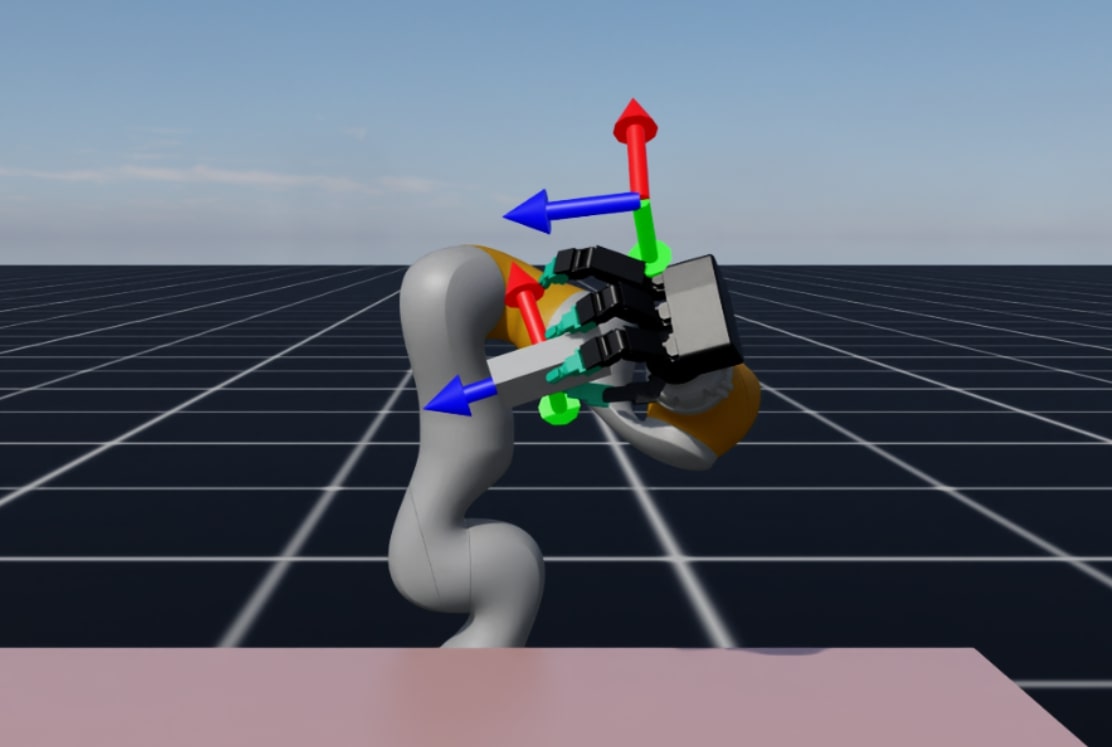
Pick up a primitive shape on the table and orient it to target pose |
|
|
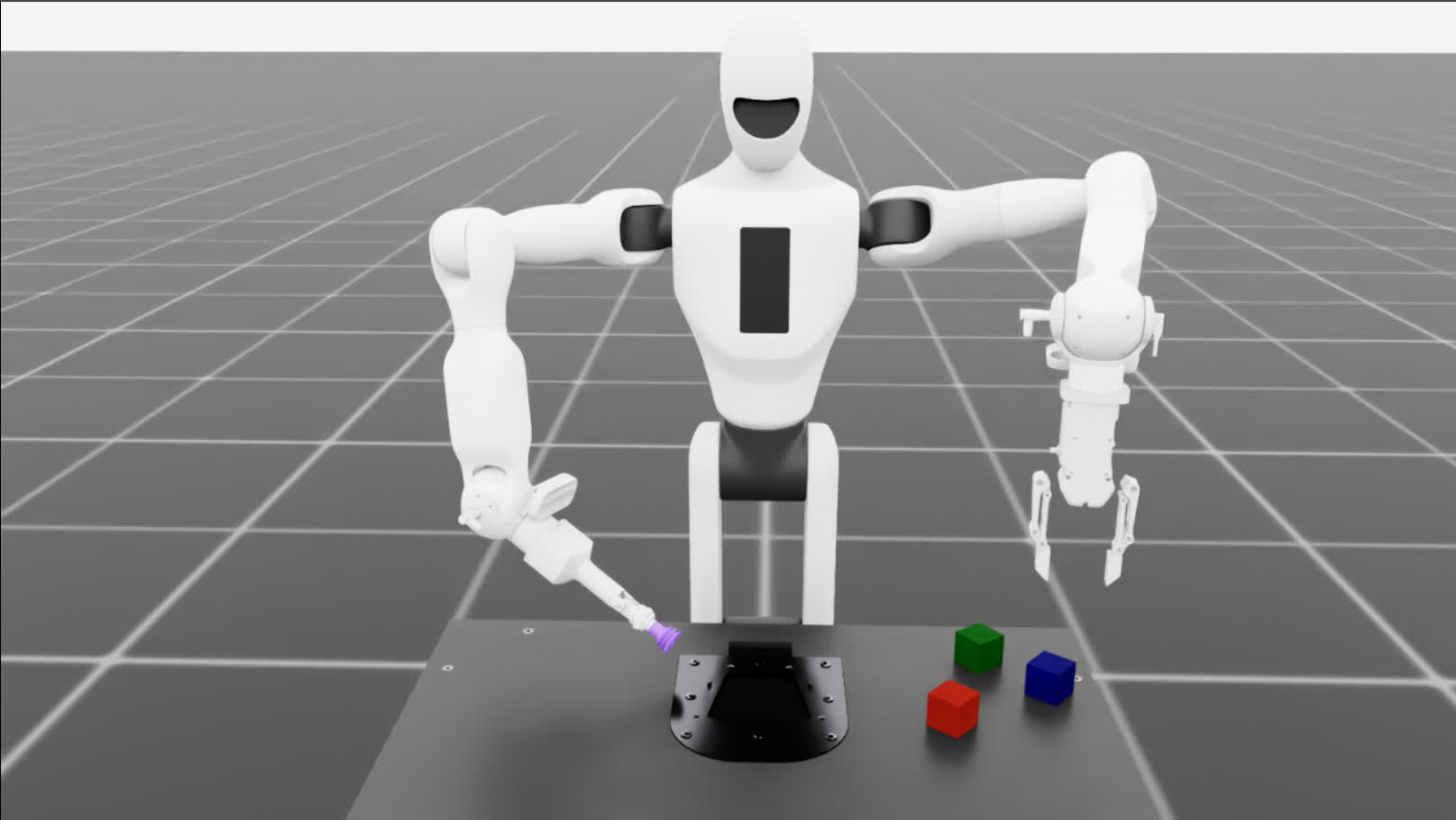
Stack three cubes (bottom to top: blue, red, green) with the left arm of a Galbot humanoid robot |
|
|
Pick up and place a mug upright with a Agibot A2D humanoid robot |
|
|
Pick up and place an object in a box with a Agibot A2D humanoid robot |
|
|
Move the end-effector to sampled target poses with the OpenArm robot |
|
|
Move the end-effector to a sampled target pose with the OpenArm robot |
|
|
Pick a cube and bring it to a sampled target position with the OpenArm robot |
|
|
Grasp the handle of a cabinet’s drawer and open it with the OpenArm robot |
Contact-rich Manipulation#
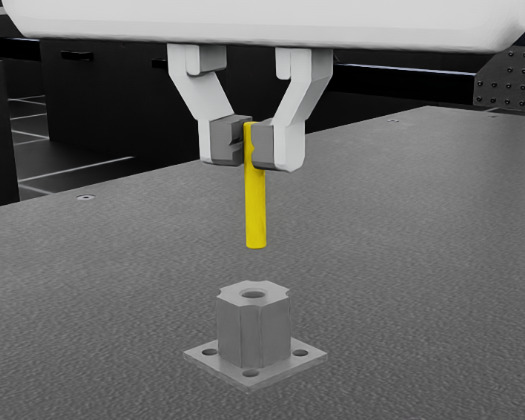
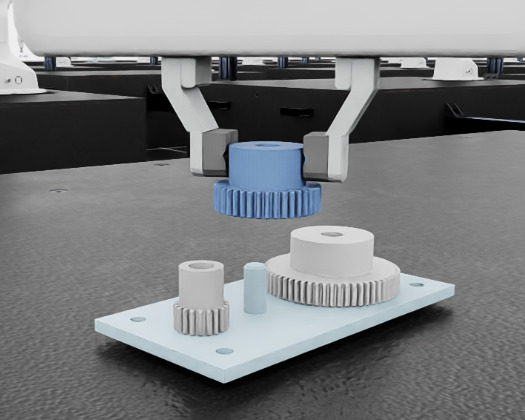
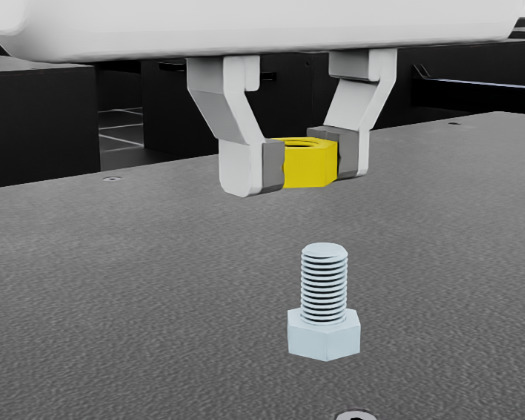
Environments based on contact-rich manipulation tasks such as peg insertion, gear meshing and nut-bolt fastening.
These tasks share the same task configurations and control options. You can switch between them by specifying the task name. For example:
Isaac-Factory-PegInsert-Direct-v0: Peg insertion with the Franka arm
Isaac-Factory-GearMesh-Direct-v0: Gear meshing with the Franka arm
Isaac-Factory-NutThread-Direct-v0: Nut-Bolt fastening with the Franka arm
World |
Environment ID |
Description |
|---|---|---|
|
Insert peg into the socket with the Franka robot |
|
|
Insert and mesh gear into the base with other gears, using the Franka robot |
|
|
Thread the nut onto the first 2 threads of the bolt, using the Franka robot |
AutoMate#
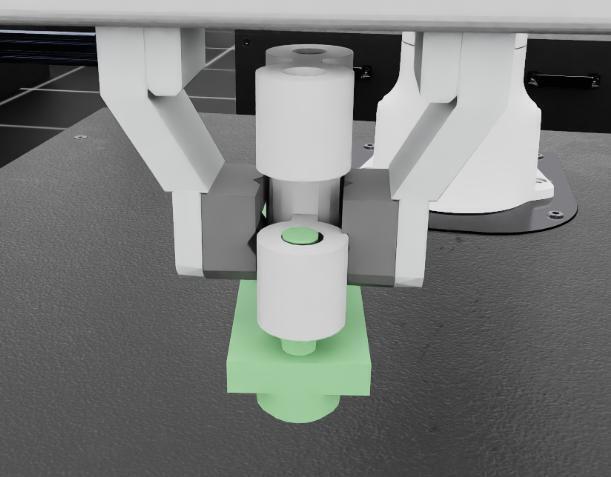
Environments based on 100 diverse assembly tasks, each involving the insertion of a plug into a socket. These tasks share a common configuration and differ by th geometry and properties of the parts.
You can switch between tasks by specifying the corresponding asset ID. Available asset IDs include:
‘00004’, ‘00007’, ‘00014’, ‘00015’, ‘00016’, ‘00021’, ‘00028’, ‘00030’, ‘00032’, ‘00042’, ‘00062’, ‘00074’, ‘00077’, ‘00078’, ‘00081’, ‘00083’, ‘00103’, ‘00110’, ‘00117’, ‘00133’, ‘00138’, ‘00141’, ‘00143’, ‘00163’, ‘00175’, ‘00186’, ‘00187’, ‘00190’, ‘00192’, ‘00210’, ‘00211’, ‘00213’, ‘00255’, ‘00256’, ‘00271’, ‘00293’, ‘00296’, ‘00301’, ‘00308’, ‘00318’, ‘00319’, ‘00320’, ‘00329’, ‘00340’, ‘00345’, ‘00346’, ‘00360’, ‘00388’, ‘00410’, ‘00417’, ‘00422’, ‘00426’, ‘00437’, ‘00444’, ‘00446’, ‘00470’, ‘00471’, ‘00480’, ‘00486’, ‘00499’, ‘00506’, ‘00514’, ‘00537’, ‘00553’, ‘00559’, ‘00581’, ‘00597’, ‘00614’, ‘00615’, ‘00638’, ‘00648’, ‘00649’, ‘00652’, ‘00659’, ‘00681’, ‘00686’, ‘00700’, ‘00703’, ‘00726’, ‘00731’, ‘00741’, ‘00755’, ‘00768’, ‘00783’, ‘00831’, ‘00855’, ‘00860’, ‘00863’, ‘01026’, ‘01029’, ‘01036’, ‘01041’, ‘01053’, ‘01079’, ‘01092’, ‘01102’, ‘01125’, ‘01129’, ‘01132’, ‘01136’.
We provide environments for both disassembly and assembly.
Attention
CUDA is recommended for running the AutoMate environments with 570 drivers. If running with Nvidia driver 570 on Linux with architecture x86_64, we follow the below steps to install CUDA 12.8. This allows for computing rewards in AutoMate environments with CUDA. If you have a different operation system or architecture, please refer to the CUDA installation page for additional instruction.
wget https://developer.download.nvidia.com/compute/cuda/12.8.0/local_installers/cuda_12.8.0_570.86.10_linux.run
sudo sh cuda_12.8.0_570.86.10_linux.run --toolkit
When using conda, cuda toolkit can be installed with:
conda install cudatoolkit
With 580 drivers and CUDA 13, we are currently unable to enable CUDA for computing the rewards. The code automatically fallbacks to CPU, resulting in slightly slower performance.
Isaac-AutoMate-Disassembly-Direct-v0: The plug starts inserted in the socket. A low-level controller lifts the plug out and moves it to a random position. This process is purely scripted and does not involve any learned policy. Therefore, it does not require policy training or evaluation. The resulting trajectories serve as demonstrations for the reverse process, i.e., learning to assemble. To run disassembly for a specific task:
python source/isaaclab_tasks/isaaclab_tasks/direct/automate/run_disassembly_w_id.py --assembly_id=ASSEMBLY_ID --disassembly_dir=DISASSEMBLY_DIR. All generated trajectories are saved to a local directoryDISASSEMBLY_DIR.Isaac-AutoMate-Assembly-Direct-v0: The goal is to insert the plug into the socket. You can use this environment to train a policy via reinforcement learning or evaluate a pre-trained checkpoint.
To train an assembly policy, we run the command
python source/isaaclab_tasks/isaaclab_tasks/direct/automate/run_w_id.py --assembly_id=ASSEMBLY_ID --train. We can customize the training process using the optional flags:--headlessto run without opening the GUI windows,--max_iterations=MAX_ITERATIONSto set the number of training iterations,--num_envs=NUM_ENVSto set the number of parallel environments during training,--seed=SEEDto assign the random seed. The policy checkpoints will be saved automatically during training in the directorylogs/rl_games/Assembly/test.To evaluate an assembly policy, we run the command
python source/isaaclab_tasks/isaaclab_tasks/direct/automate/run_w_id.py --assembly_id=ASSEMBLY_ID --checkpoint=CHECKPOINT --log_eval. The evaluation results are stored inevaluation_{ASSEMBLY_ID}.h5.
World |
Environment ID |
Description |
|---|---|---|
|
Lift a plug out of the socket with the Franka robot |
|
|
Insert a plug into its corresponding socket with the Franka robot |
FORGE#
FORGE environments extend Factory environments with:
Force sensing: Add observations for force experienced by the end-effector.
Excessive force penalty: Add an option to penalize the agent for excessive contact forces.
Dynamics randomization: Randomize controller gains, asset properties (friction, mass), and dead-zone.
Success prediction: Add an extra action that predicts task success.
These tasks share the same task configurations and control options. You can switch between them by specifying the task name.
Isaac-Forge-PegInsert-Direct-v0: Peg insertion with the Franka arm
Isaac-Forge-GearMesh-Direct-v0: Gear meshing with the Franka arm
Isaac-Forge-NutThread-Direct-v0: Nut-Bolt fastening with the Franka arm
World |
Environment ID |
Description |
|---|---|---|
|
Insert peg into the socket with the Franka robot |
|
|
Insert and mesh gear into the base with other gears, using the Franka robot |
|
|
Thread the nut onto the first 2 threads of the bolt, using the Franka robot |
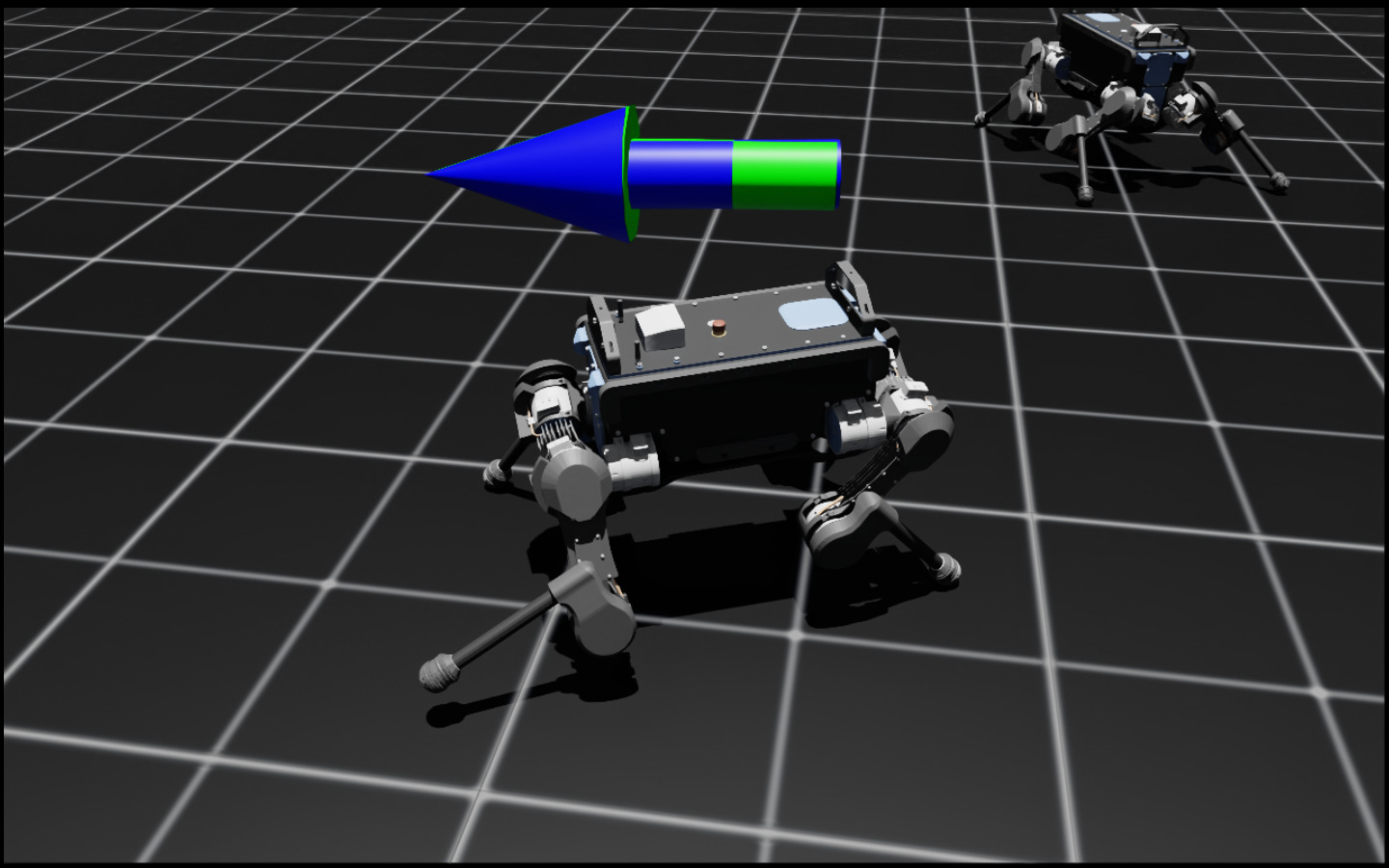
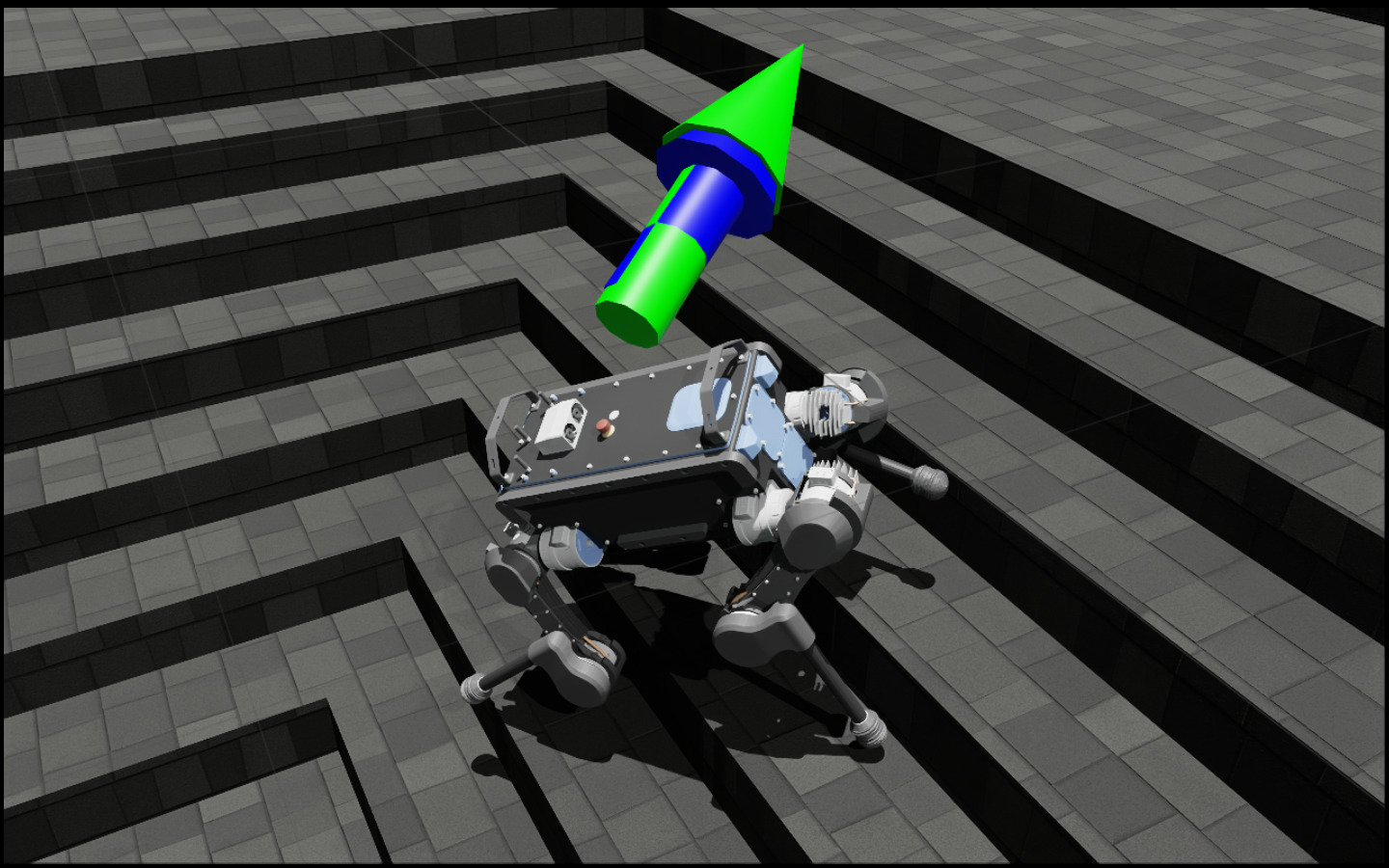
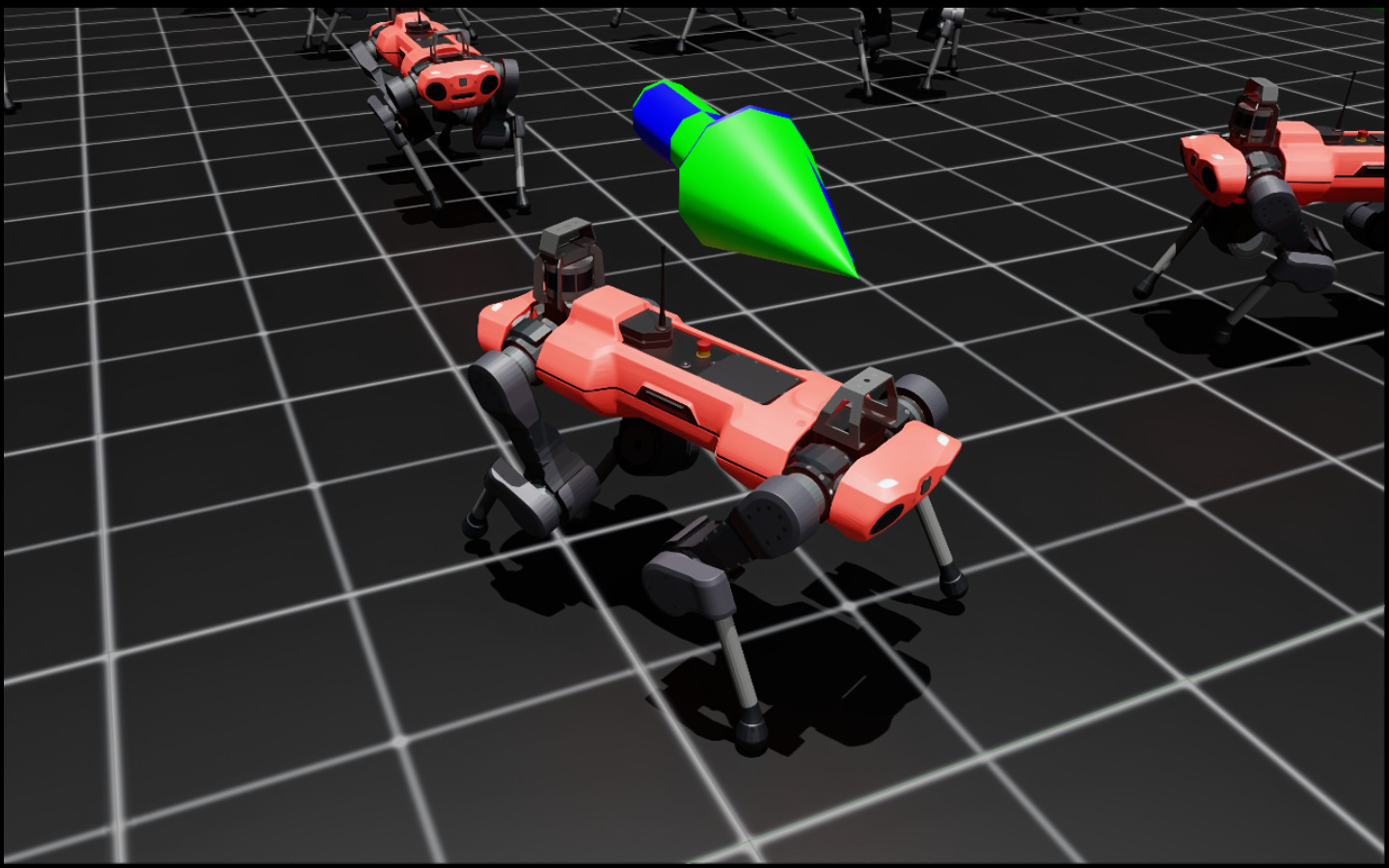
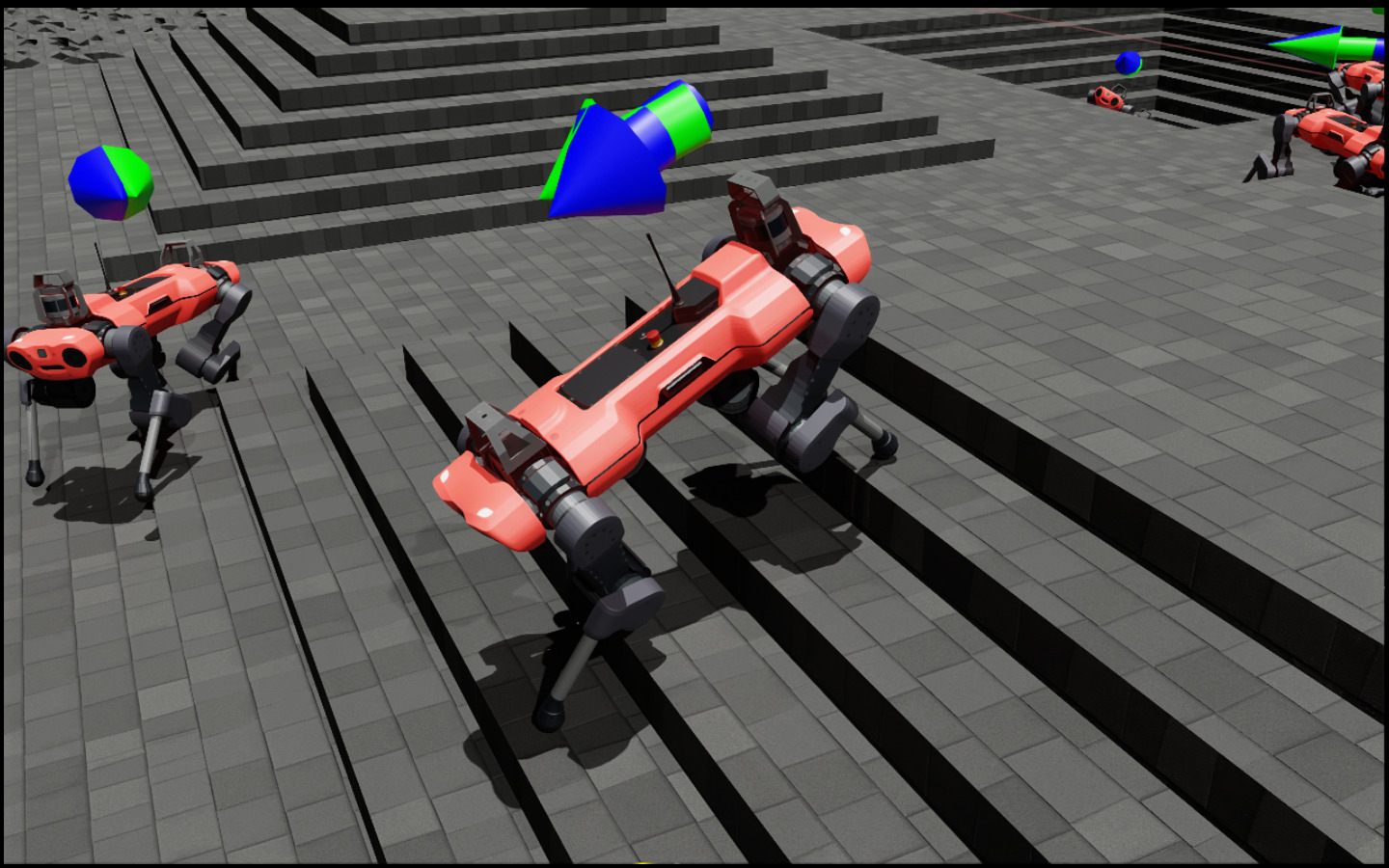
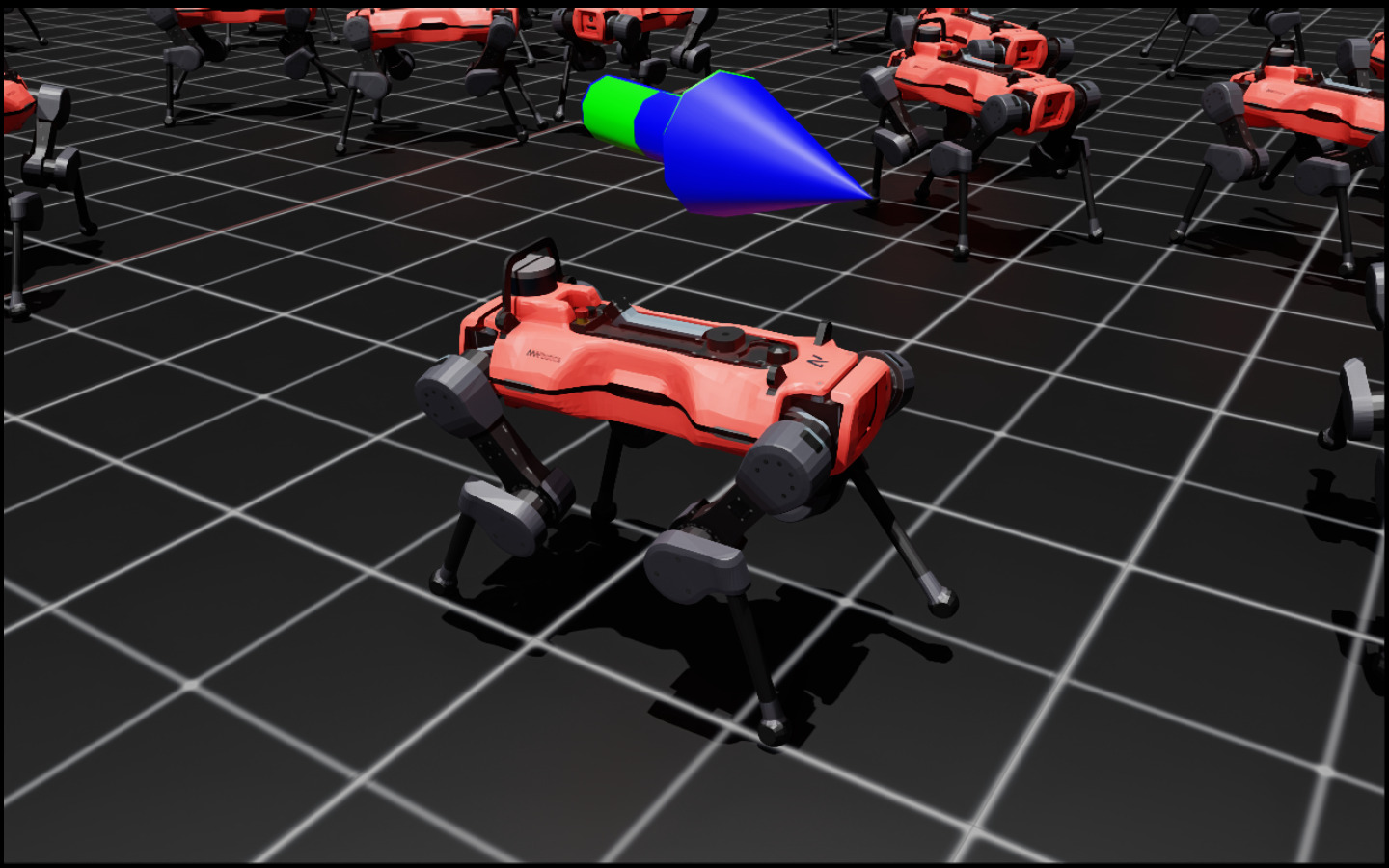
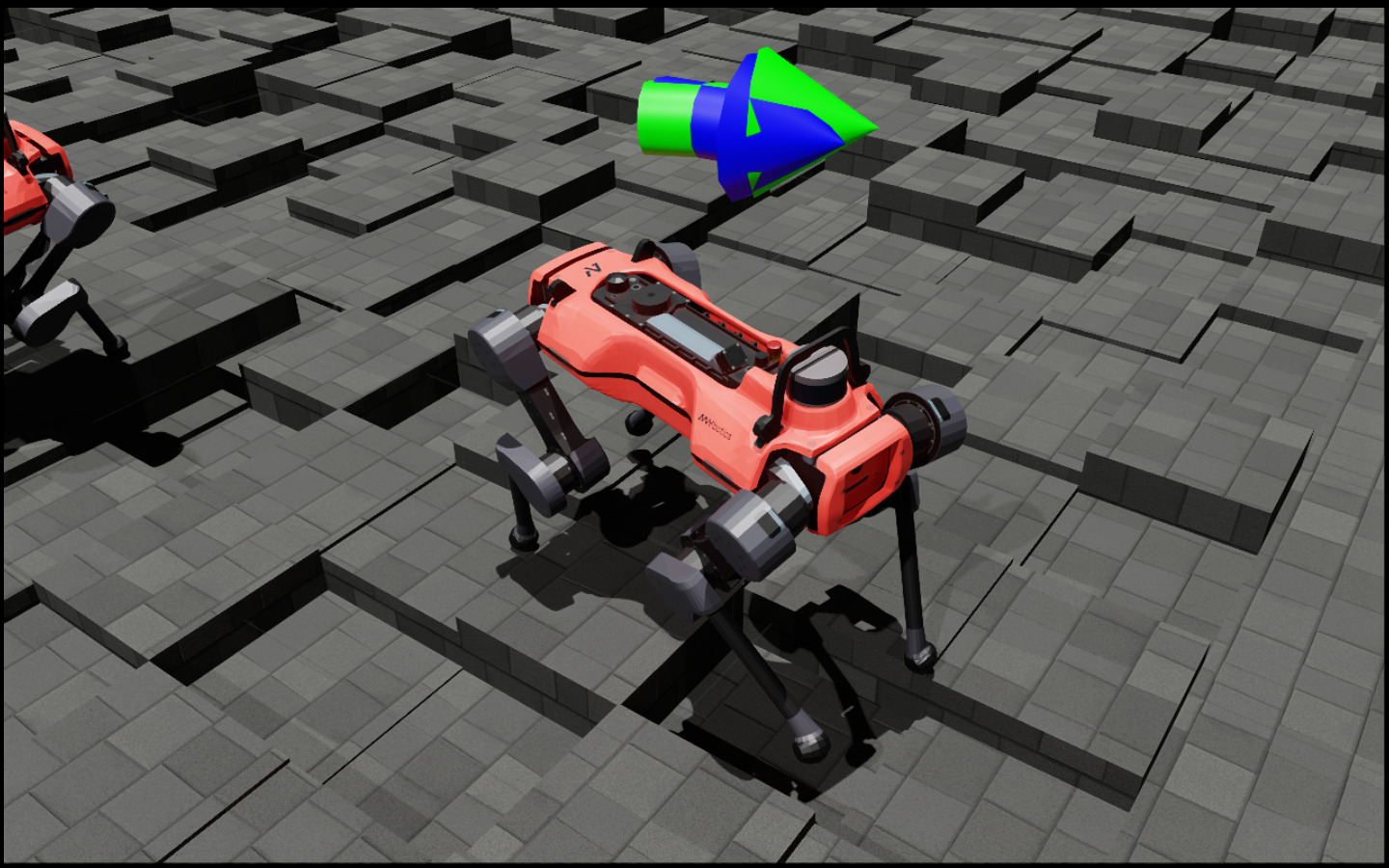
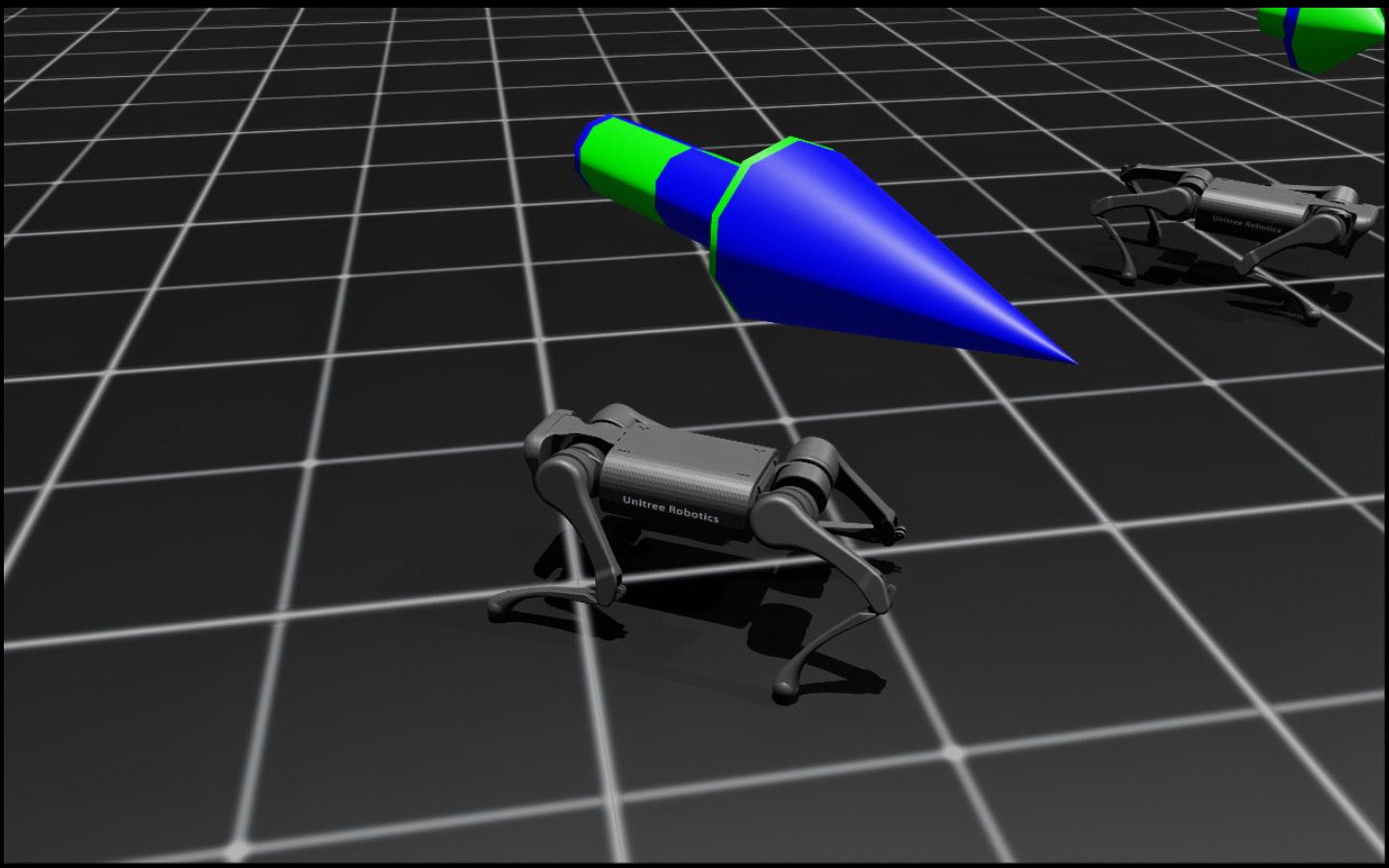
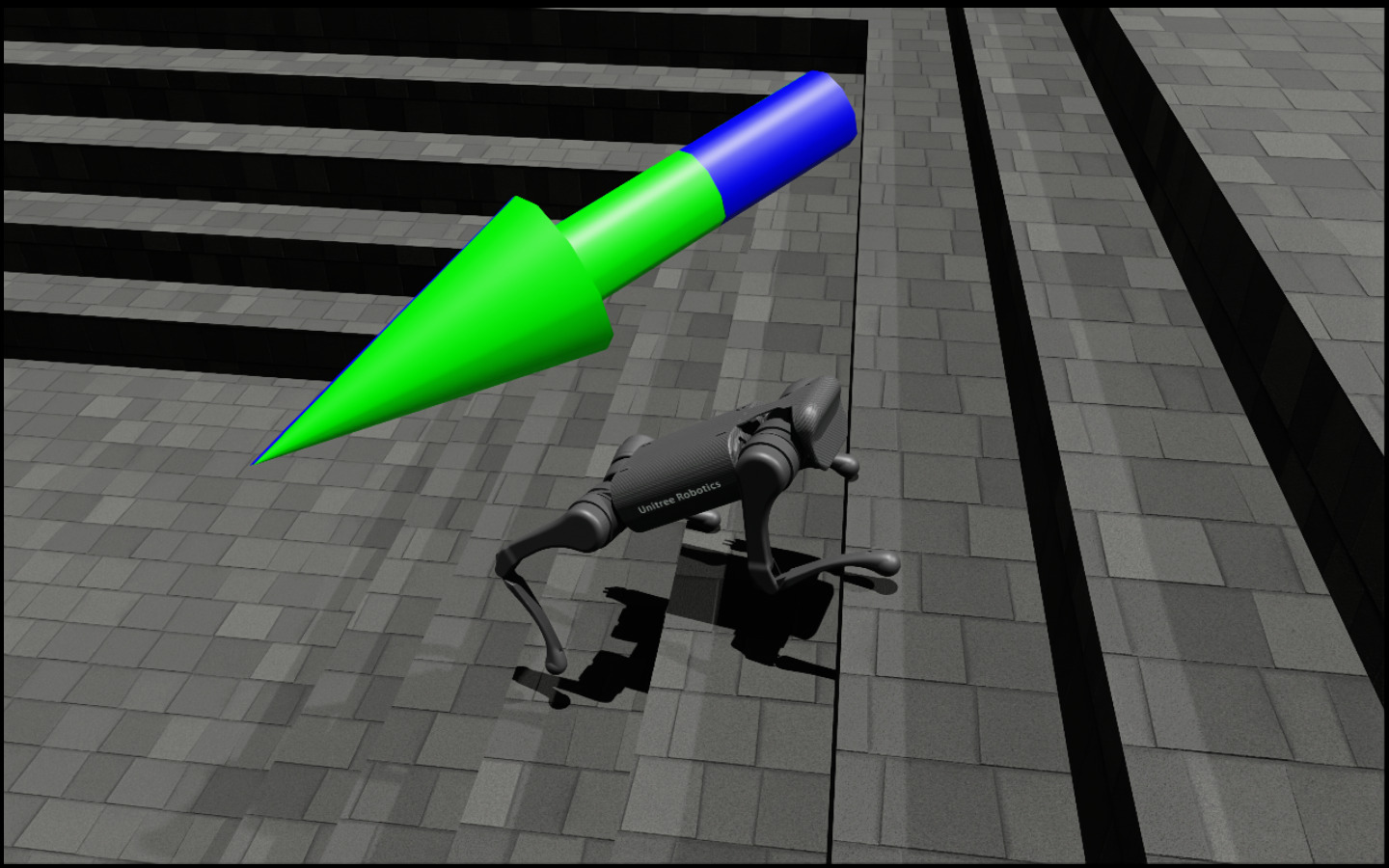
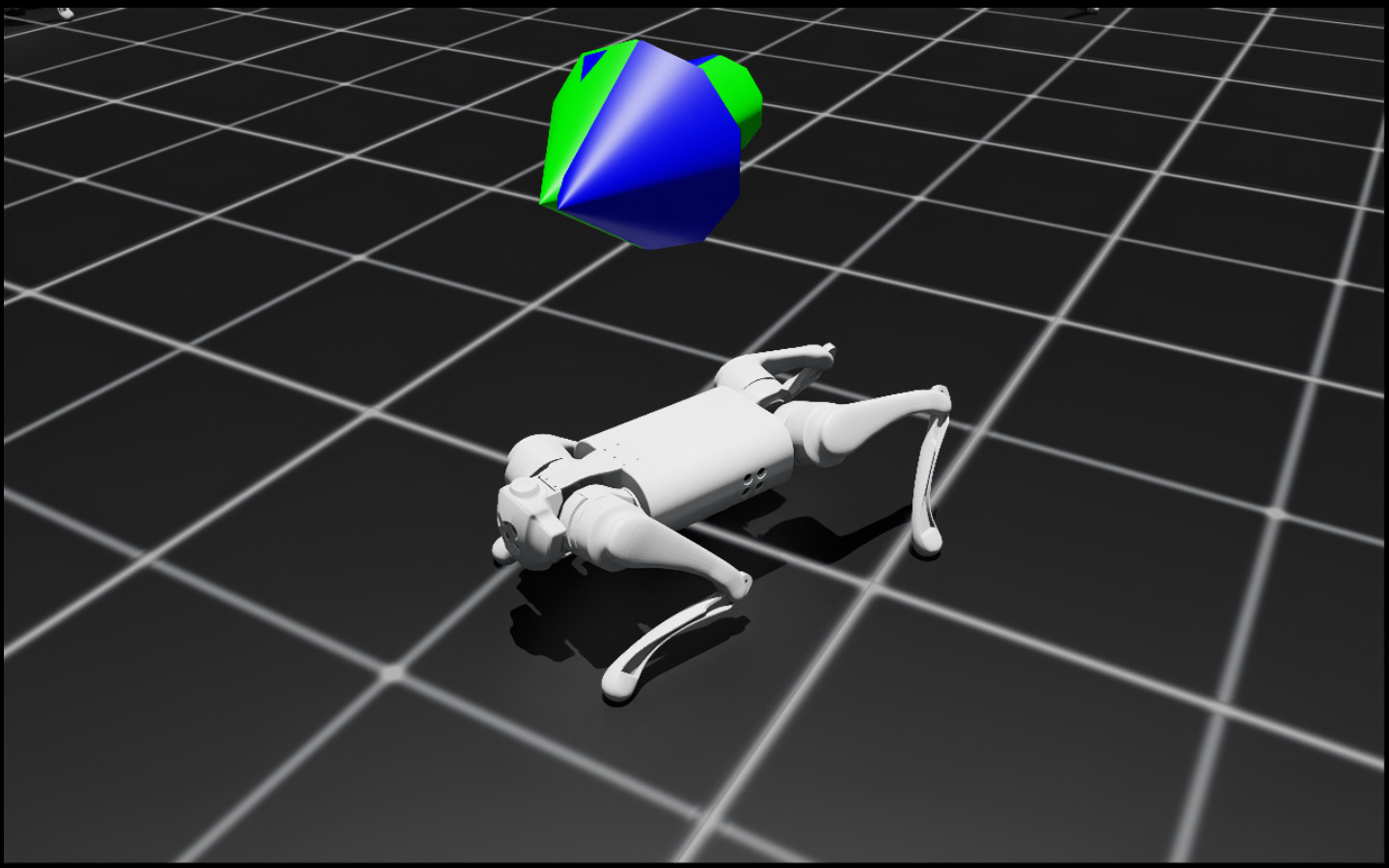
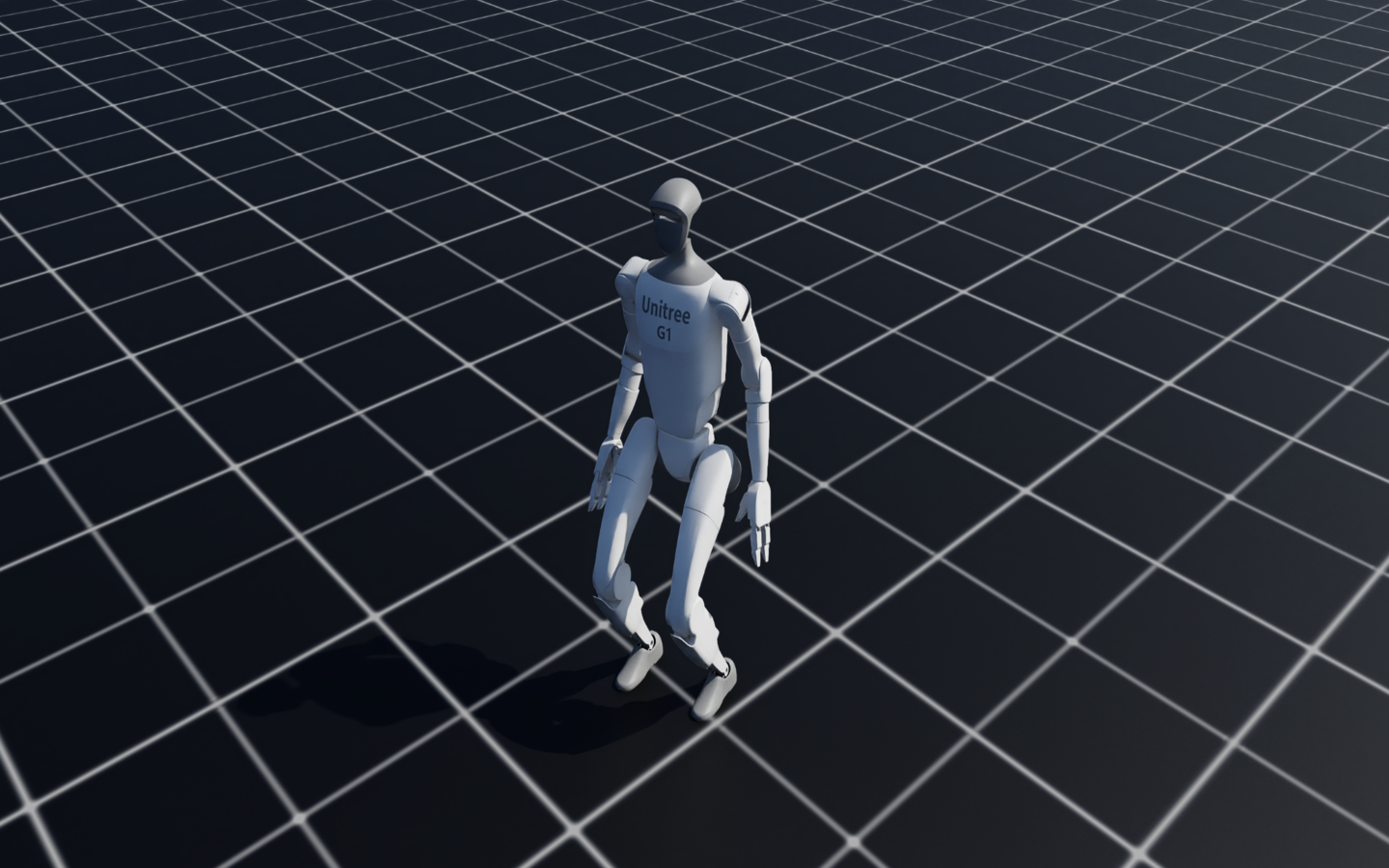
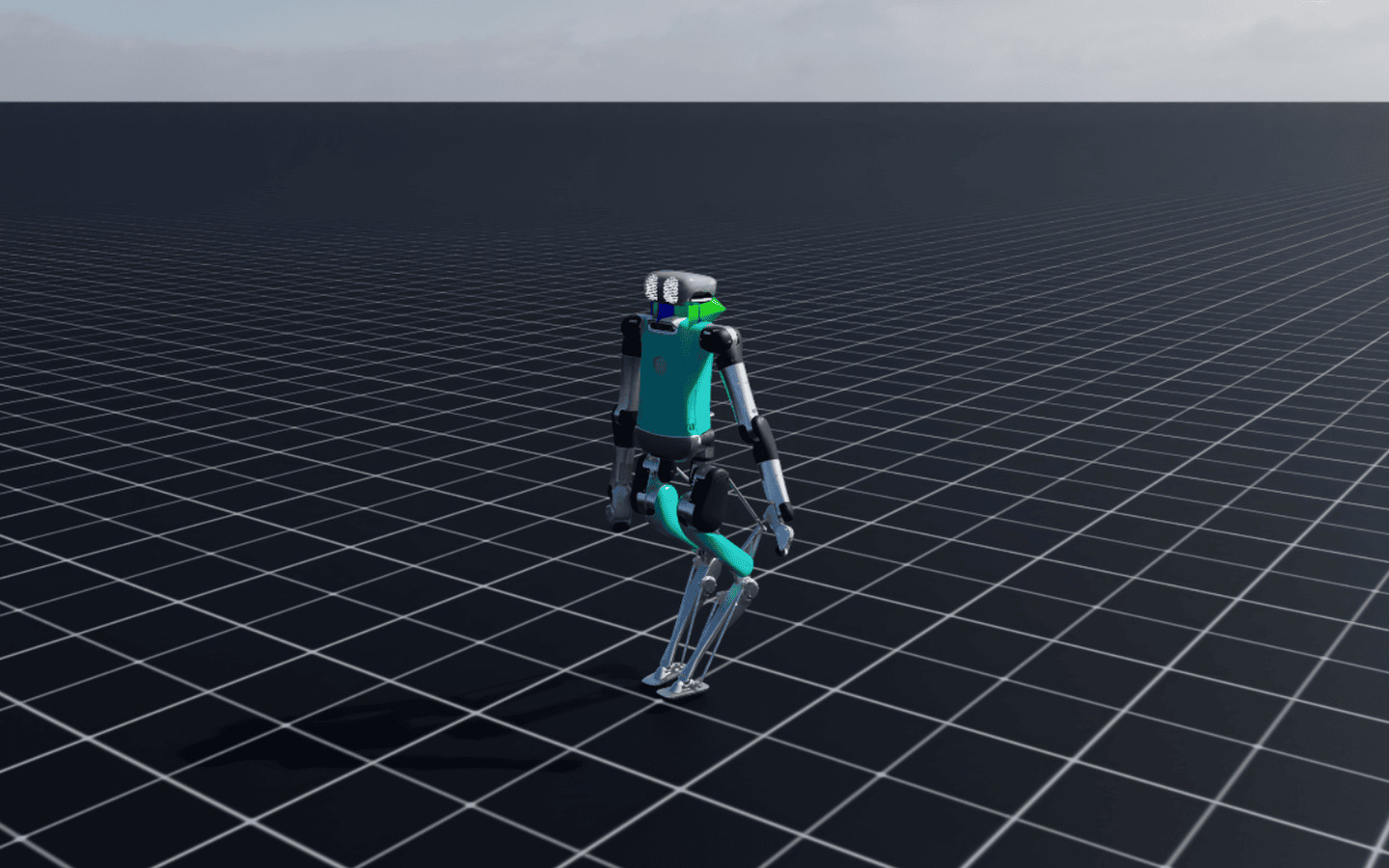
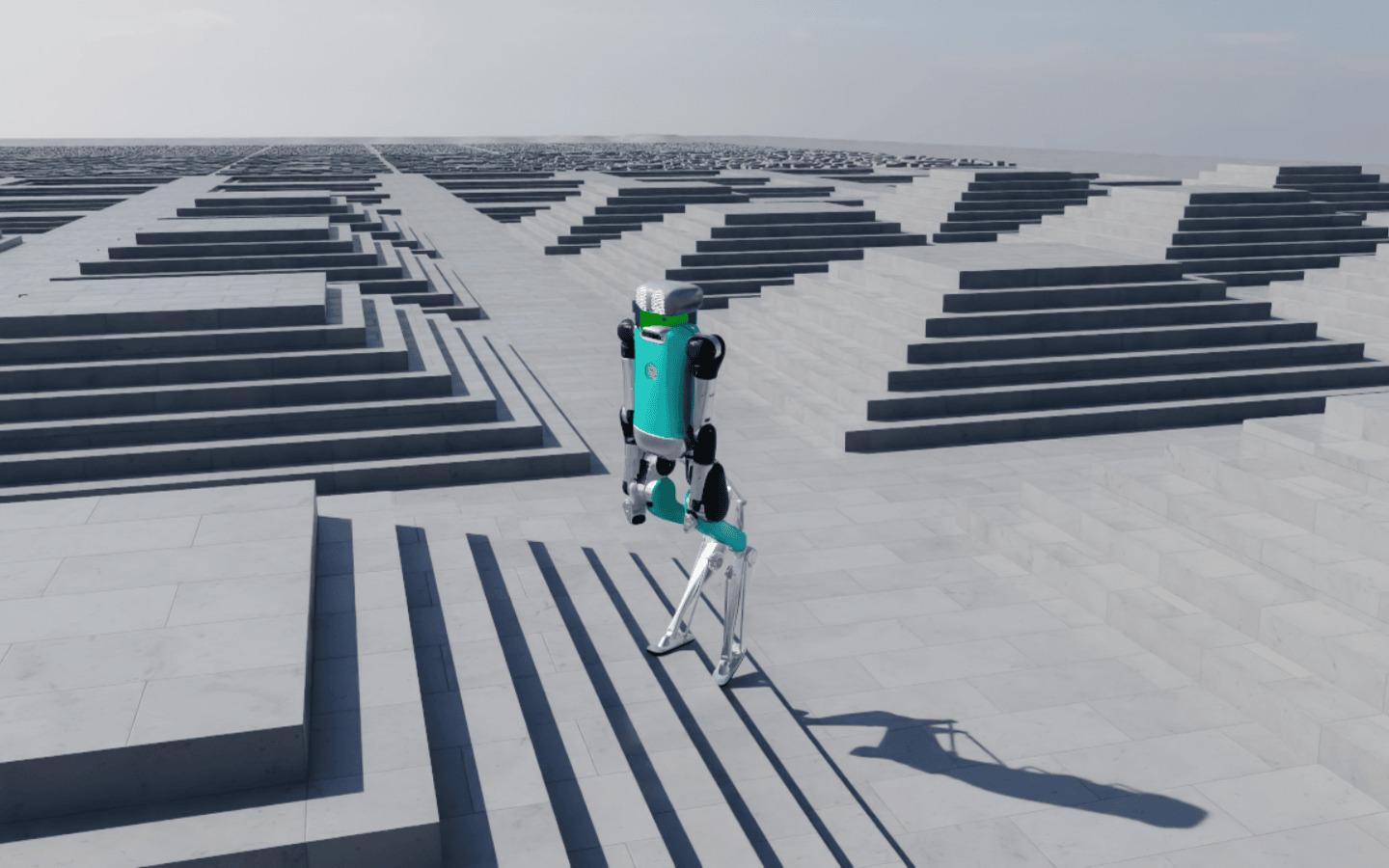
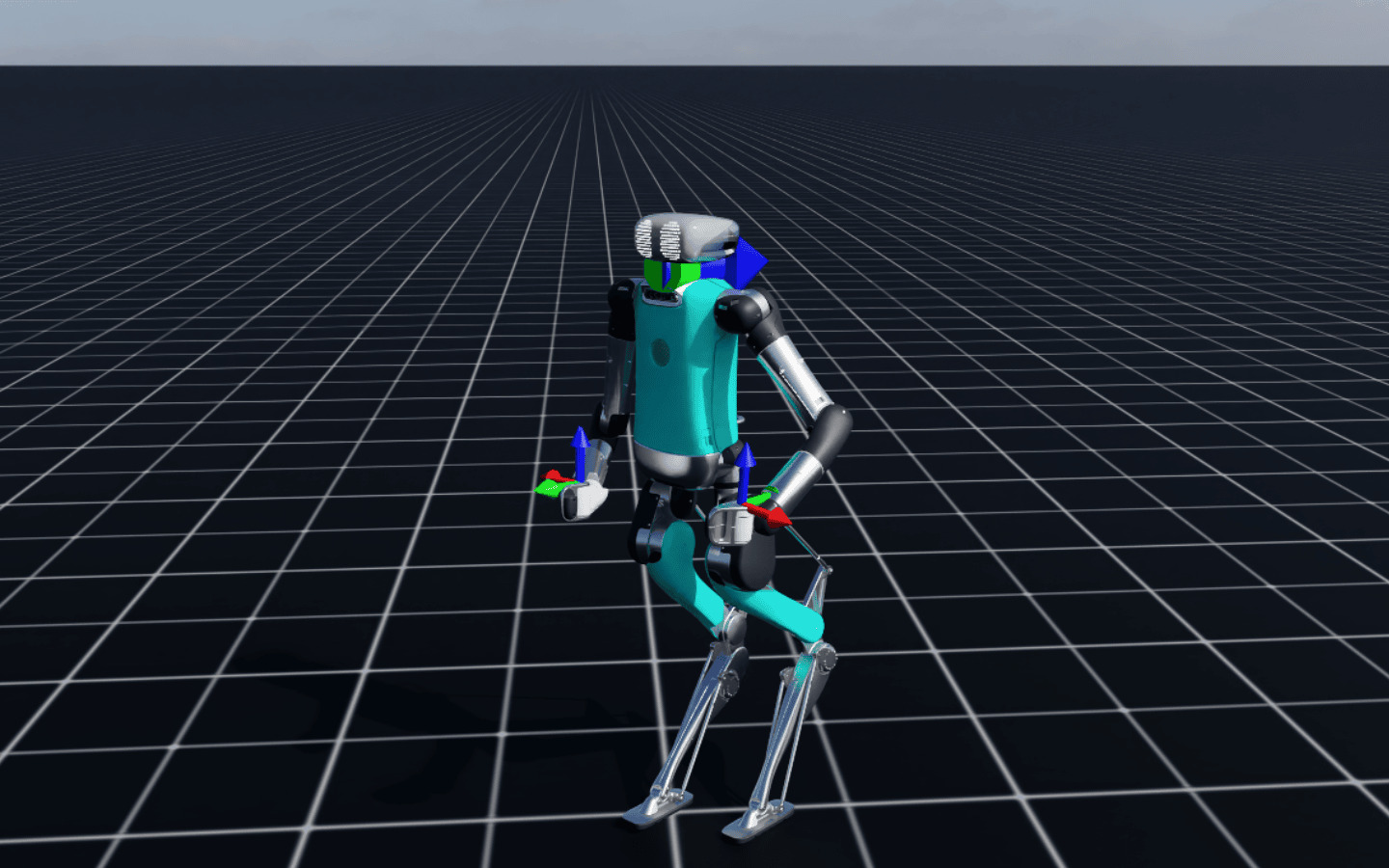
Locomotion#
Environments based on legged locomotion tasks.
World |
Environment ID |
Description |
|---|---|---|
|
Track a velocity command on flat terrain with the Anymal B robot |
|
|
Track a velocity command on rough terrain with the Anymal B robot |
|
|
Track a velocity command on flat terrain with the Anymal C robot |
|
|
Track a velocity command on rough terrain with the Anymal C robot |
|
|
Track a velocity command on flat terrain with the Anymal D robot |
|
|
Track a velocity command on rough terrain with the Anymal D robot |
|
|
Track a velocity command on flat terrain with the Unitree A1 robot |
|
|
Track a velocity command on rough terrain with the Unitree A1 robot |
|
|
Track a velocity command on flat terrain with the Unitree Go1 robot |
|
|
Track a velocity command on rough terrain with the Unitree Go1 robot |
|
|
Track a velocity command on flat terrain with the Unitree Go2 robot |
|
|
Track a velocity command on rough terrain with the Unitree Go2 robot |
|
|
Track a velocity command on flat terrain with the Boston Dynamics Spot robot |
|
|
Track a velocity command on flat terrain with the Unitree H1 robot |
|
|
Track a velocity command on rough terrain with the Unitree H1 robot |
|
|
Track a velocity command on flat terrain with the Unitree G1 robot |
|
|
Track a velocity command on rough terrain with the Unitree G1 robot |
|
|
Track a velocity command on flat terrain with the Agility Digit robot |
|
|
Track a velocity command on rough terrain with the Agility Digit robot |
|
|
Track a root velocity and hand pose command with the Agility Digit robot |



Navigation#
World |
Environment ID |
Description |
|---|---|---|
|
Navigate towards a target x-y position and heading with the ANYmal C robot. |
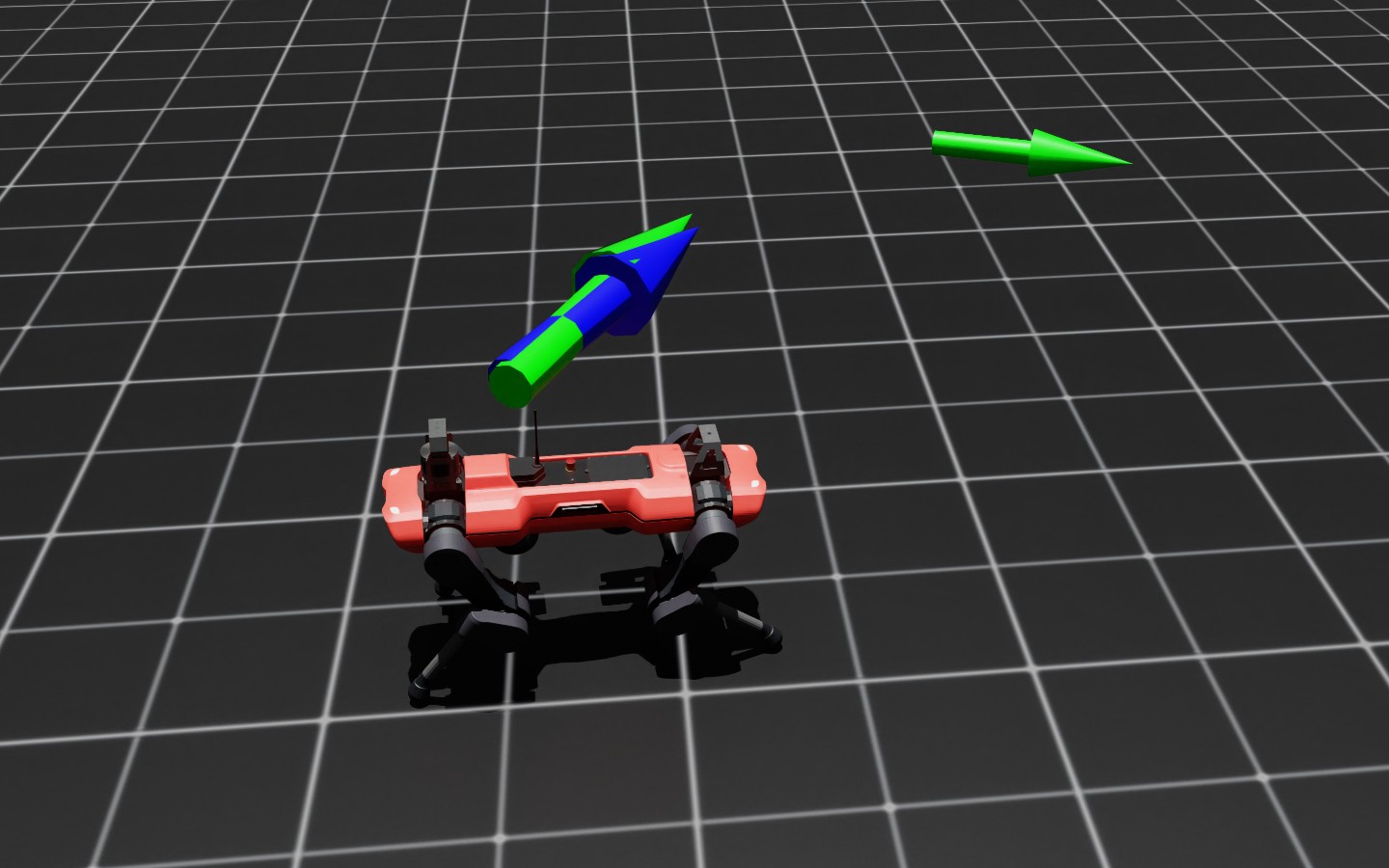
Multirotor#
Note
The multirotor entry provides an environment configuration for flying the ARL robot. See the drone_arl folder and the ARL robot config (ARL_ROBOT_1_CFG) in the codebase for details.
World |
Environment ID |
Description |
|---|---|---|
|
Setpoint position control for the ARL robot using the track_position_state_based task. |
Others#
Note
Adversarial Motion Priors (AMP) training is only available with the skrl library, as it is the only one of the currently
integrated libraries that supports it out-of-the-box (for the other libraries, it is necessary to implement the algorithm and architectures).
See the skrl’s AMP Documentation for more information.
The AMP algorithm can be activated by adding the command line input --algorithm AMP to the train/play script.
For evaluation, the play script’s command line input --real-time allows the interaction loop between the environment and the agent to run in real time, if possible.
World |
Environment ID |
Description |
|---|---|---|
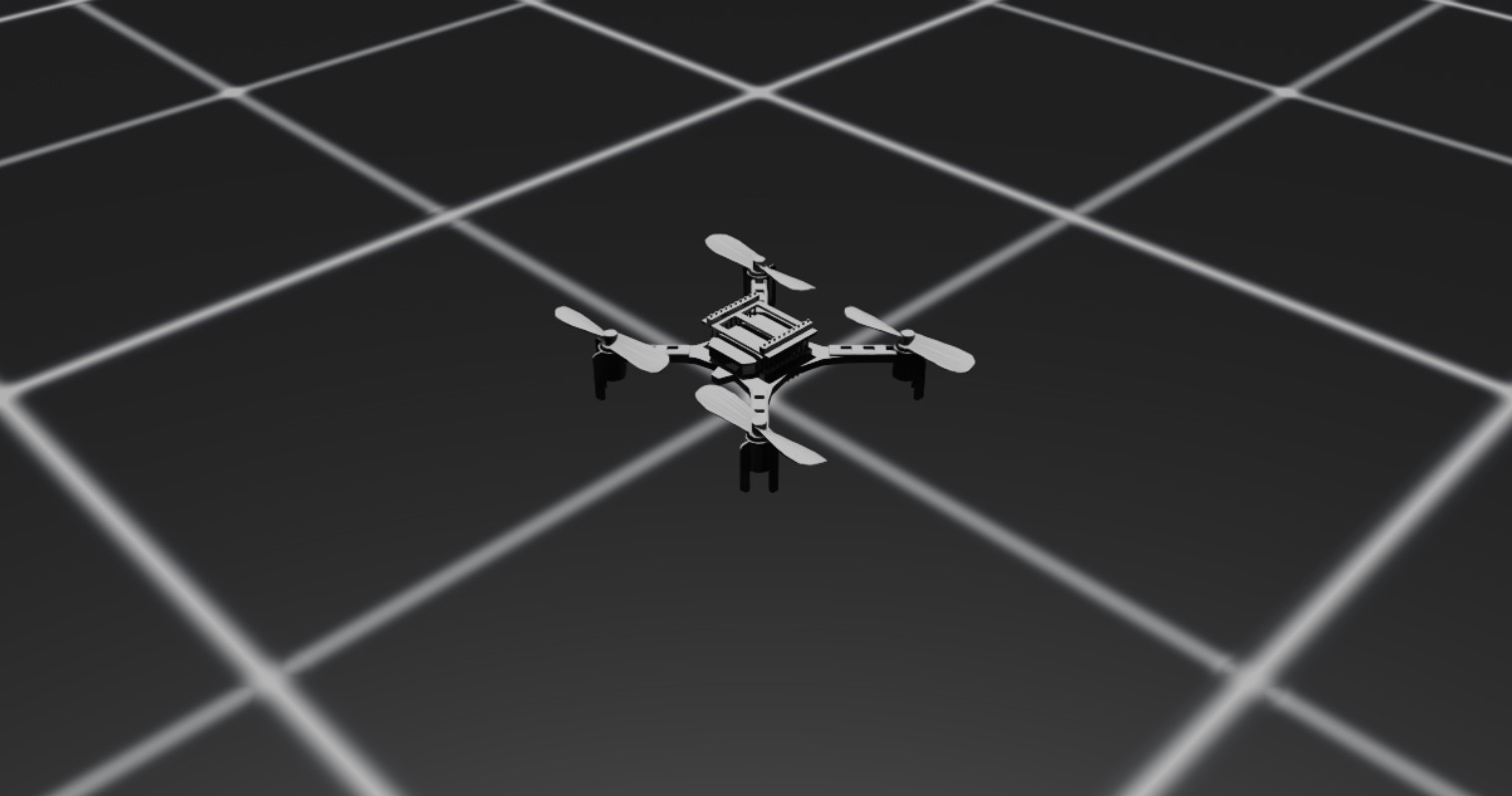
|
Fly and hover the Crazyflie copter at a goal point by applying thrust. |
|
|
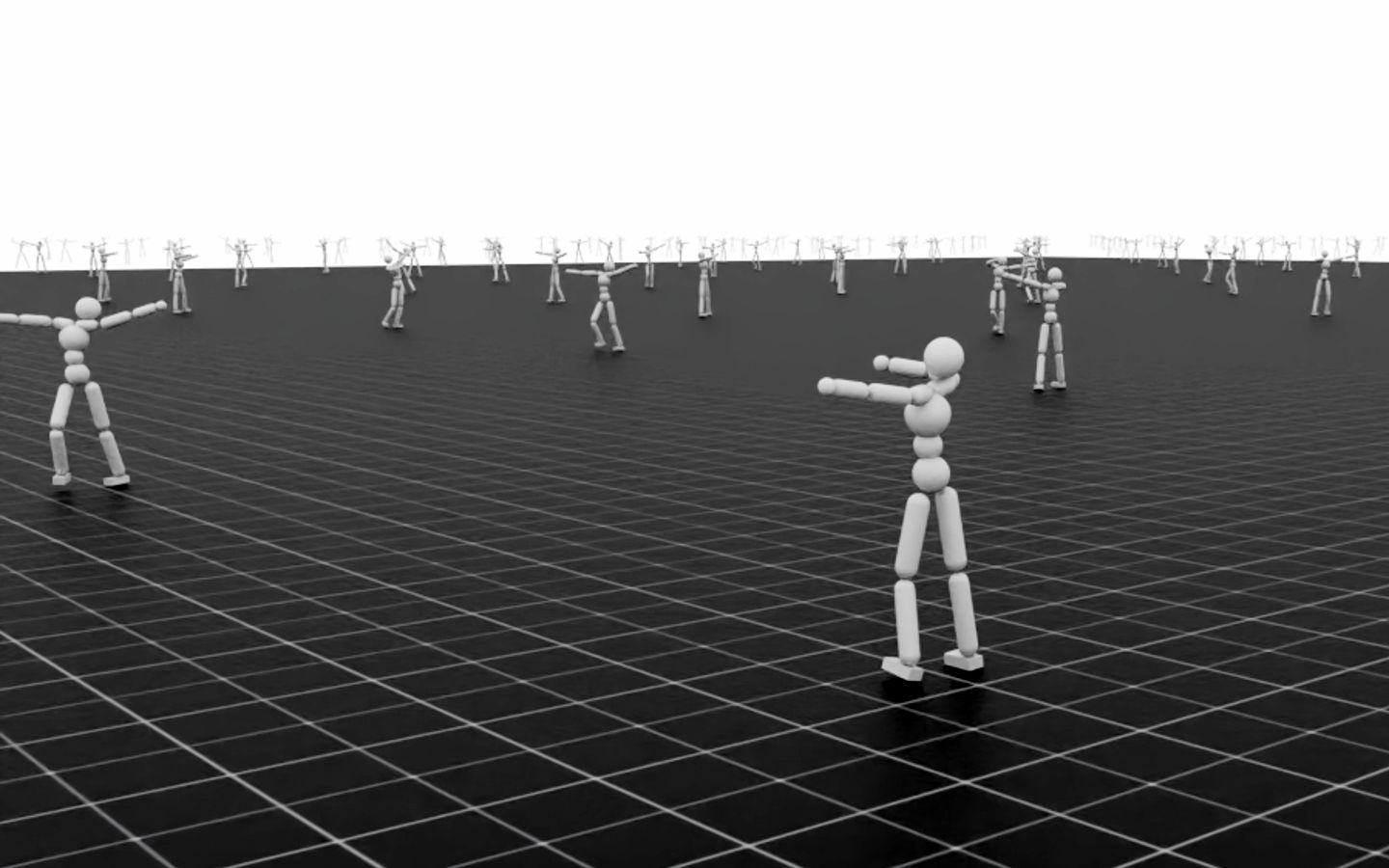
Isaac-Humanoid-AMP-Dance-Direct-v0 |
Move a humanoid robot by imitating different pre-recorded human animations (Adversarial Motion Priors). |
Spaces showcase#
The cartpole_showcase folder contains showcase tasks (based on the Cartpole and Cartpole-Camera Direct tasks) for the definition/use of the various Gymnasium observation and action spaces supported in Isaac Lab.
Note
Currently, only Isaac Lab’s Direct workflow supports the definition of observation and action spaces other than Box.
See Direct workflow’s observation_space / action_space
documentation for more details.
The following tables summarize the different pairs of showcased spaces for the Cartpole and Cartpole-Camera tasks.
Replace <OBSERVATION> and <ACTION> with the observation and action spaces to be explored in the task names for training and evaluation.
| action space | ||||||
| Box | Discrete | MultiDiscrete | ||||
observation space |
Box | x | x | x | ||
| Discrete | x | x | x | |||
| MultiDiscrete | x | x | x | |||
| Dict | x | x | x | |||
| Tuple | x | x | x | |||
| action space | ||||||
| Box | Discrete | MultiDiscrete | ||||
observation space |
Box | x | x | x | ||
| Discrete | - | - | - | |||
| MultiDiscrete | - | - | - | |||
| Dict | x | x | x | |||
| Tuple | x | x | x | |||
Multi-agent#
Note
True mutli-agent training is only available with the skrl library, see the Multi-Agents Documentation for more information.
It supports the IPPO and MAPPO algorithms, which can be activated by adding the command line input --algorithm IPPO or --algorithm MAPPO to the train/play script.
If these environments are run with other libraries or without the IPPO or MAPPO flags, they will be converted to single-agent environments under the hood.
Classic#
World |
Environment ID |
Description |
|---|---|---|
|
Move the cart and the pendulum to keep the last one upwards in the classic inverted double pendulum on a cart control |
Manipulation#
Environments based on fixed-arm manipulation tasks.
World |
Environment ID |
Description |
|---|---|---|
|
Passing an object from one hand over to the other hand |
Comprehensive List of Environments#
For environments that have a different task name listed under Inference Task Name, please use the Inference Task Name
provided when running play.py or any inferencing workflows. These tasks provide more suitable configurations for
inferencing, including reading from an already trained checkpoint and disabling runtime perturbations used for training.
Task Name |
Inference Task Name |
Workflow |
RL Library |
Isaac-Ant-Direct-v0 |
Direct |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
|
Isaac-Ant-v0 |
Manager Based |
rsl_rl (PPO), rl_games (PPO), skrl (PPO), sb3 (PPO) |
|
Isaac-Cart-Double-Pendulum-Direct-v0 |
Direct |
rl_games (PPO), skrl (IPPO, PPO, MAPPO) |
|
Isaac-Cartpole-Camera-Showcase-Box-Box-Direct-v0 (Requires running with |
Direct |
skrl (PPO) |
|
Isaac-Cartpole-Camera-Showcase-Box-Discrete-Direct-v0 (Requires running with |
Direct |
skrl (PPO) |
|
Isaac-Cartpole-Camera-Showcase-Box-MultiDiscrete-Direct-v0 (Requires running with |
Direct |
skrl (PPO) |
|
Isaac-Cartpole-Camera-Showcase-Dict-Box-Direct-v0 (Requires running with |
Direct |
skrl (PPO) |
|
Isaac-Cartpole-Camera-Showcase-Dict-Discrete-Direct-v0 (Requires running with |
Direct |
skrl (PPO) |
|
Isaac-Cartpole-Camera-Showcase-Dict-MultiDiscrete-Direct-v0 (Requires running with |
Direct |
skrl (PPO) |
|
Isaac-Cartpole-Camera-Showcase-Tuple-Box-Direct-v0 (Requires running with |
Direct |
skrl (PPO) |
|
Isaac-Cartpole-Camera-Showcase-Tuple-Discrete-Direct-v0 (Requires running with |
Direct |
skrl (PPO) |
|
Isaac-Cartpole-Camera-Showcase-Tuple-MultiDiscrete-Direct-v0 (Requires running with |
Direct |
skrl (PPO) |
|
Isaac-Cartpole-Depth-Camera-Direct-v0 (Requires running with |
Direct |
rl_games (PPO), skrl (PPO) |
|
Isaac-Cartpole-Depth-v0 (Requires running with |
Manager Based |
rl_games (PPO) |
|
Isaac-Cartpole-Direct-v0 |
Direct |
rl_games (PPO), rsl_rl (PPO), skrl (PPO), sb3 (PPO) |
|
Isaac-Cartpole-RGB-Camera-Direct-v0 (Requires running with |
Direct |
rl_games (PPO), skrl (PPO) |
|
Isaac-Cartpole-RGB-ResNet18-v0 (Requires running with |
Manager Based |
rl_games (PPO) |
|
Isaac-Cartpole-RGB-TheiaTiny-v0 (Requires running with |
Manager Based |
rl_games (PPO) |
|
Isaac-Cartpole-RGB-v0 (Requires running with |
Manager Based |
rl_games (PPO) |
|
Isaac-Cartpole-Showcase-Box-Box-Direct-v0 |
Direct |
skrl (PPO) |
|
Isaac-Cartpole-Showcase-Box-Discrete-Direct-v0 |
Direct |
skrl (PPO) |
|
Isaac-Cartpole-Showcase-Box-MultiDiscrete-Direct-v0 |
Direct |
skrl (PPO) |
|
Isaac-Cartpole-Showcase-Dict-Box-Direct-v0 |
Direct |
skrl (PPO) |
|
Isaac-Cartpole-Showcase-Dict-Discrete-Direct-v0 |
Direct |
skrl (PPO) |
|
Isaac-Cartpole-Showcase-Dict-MultiDiscrete-Direct-v0 |
Direct |
skrl (PPO) |
|
Isaac-Cartpole-Showcase-Discrete-Box-Direct-v0 |
Direct |
skrl (PPO) |
|
Isaac-Cartpole-Showcase-Discrete-Discrete-Direct-v0 |
Direct |
skrl (PPO) |
|
Isaac-Cartpole-Showcase-Discrete-MultiDiscrete-Direct-v0 |
Direct |
skrl (PPO) |
|
Isaac-Cartpole-Showcase-MultiDiscrete-Box-Direct-v0 |
Direct |
skrl (PPO) |
|
Isaac-Cartpole-Showcase-MultiDiscrete-Discrete-Direct-v0 |
Direct |
skrl (PPO) |
|
Isaac-Cartpole-Showcase-MultiDiscrete-MultiDiscrete-Direct-v0 |
Direct |
skrl (PPO) |
|
Isaac-Cartpole-Showcase-Tuple-Box-Direct-v0 |
Direct |
skrl (PPO) |
|
Isaac-Cartpole-Showcase-Tuple-Discrete-Direct-v0 |
Direct |
skrl (PPO) |
|
Isaac-Cartpole-Showcase-Tuple-MultiDiscrete-Direct-v0 |
Direct |
skrl (PPO) |
|
Isaac-Cartpole-v0 |
Manager Based |
rl_games (PPO), rsl_rl (PPO), skrl (PPO), sb3 (PPO) |
|
Isaac-Factory-GearMesh-Direct-v0 |
Direct |
rl_games (PPO) |
|
Isaac-Factory-NutThread-Direct-v0 |
Direct |
rl_games (PPO) |
|
Isaac-Factory-PegInsert-Direct-v0 |
Direct |
rl_games (PPO) |
|
Isaac-AutoMate-Assembly-Direct-v0 |
Direct |
rl_games (PPO) |
|
Isaac-AutoMate-Disassembly-Direct-v0 |
Direct |
||
Isaac-Forge-GearMesh-Direct-v0 |
Direct |
rl_games (PPO) |
|
Isaac-Forge-NutThread-Direct-v0 |
Direct |
rl_games (PPO) |
|
Isaac-Forge-PegInsert-Direct-v0 |
Direct |
rl_games (PPO) |
|
Isaac-Franka-Cabinet-Direct-v0 |
Direct |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
|
Isaac-Humanoid-AMP-Dance-Direct-v0 |
Direct |
skrl (AMP) |
|
Isaac-Humanoid-AMP-Run-Direct-v0 |
Direct |
skrl (AMP) |
|
Isaac-Humanoid-AMP-Walk-Direct-v0 |
Direct |
skrl (AMP) |
|
Isaac-Humanoid-Direct-v0 |
Direct |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
|
Isaac-Humanoid-v0 |
Manager Based |
rsl_rl (PPO), rl_games (PPO), skrl (PPO), sb3 (PPO) |
|
Isaac-Lift-Cube-Franka-IK-Abs-v0 |
Manager Based |
||
Isaac-Lift-Cube-Franka-IK-Rel-v0 |
Manager Based |
||
Isaac-Lift-Cube-Franka-v0 |
Isaac-Lift-Cube-Franka-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO), rl_games (PPO), sb3 (PPO) |
Isaac-Lift-Teddy-Bear-Franka-IK-Abs-v0 |
Manager Based |
||
Isaac-Tracking-LocoManip-Digit-v0 |
Isaac-Tracking-LocoManip-Digit-Play-v0 |
Manager Based |
rsl_rl (PPO) |
Isaac-Navigation-Flat-Anymal-C-v0 |
Isaac-Navigation-Flat-Anymal-C-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Open-Drawer-Franka-IK-Abs-v0 |
Manager Based |
||
Isaac-Open-Drawer-Franka-IK-Rel-v0 |
Manager Based |
||
Isaac-Open-Drawer-Franka-v0 |
Isaac-Open-Drawer-Franka-Play-v0 |
Manager Based |
rsl_rl (PPO), rl_games (PPO), skrl (PPO) |
Isaac-Quadcopter-Direct-v0 |
Direct |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
|
Isaac-Reach-Franka-IK-Abs-v0 |
Manager Based |
||
Isaac-Reach-Franka-IK-Rel-v0 |
Manager Based |
||
Isaac-Reach-Franka-OSC-v0 |
Isaac-Reach-Franka-OSC-Play-v0 |
Manager Based |
rsl_rl (PPO) |
Isaac-Reach-Franka-v0 |
Isaac-Reach-Franka-Play-v0 |
Manager Based |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
Isaac-Reach-UR10-v0 |
Isaac-Reach-UR10-Play-v0 |
Manager Based |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
Isaac-Deploy-Reach-UR10e-v0 |
Isaac-Deploy-Reach-UR10e-Play-v0 |
Manager Based |
rsl_rl (PPO) |
Isaac-Repose-Cube-Allegro-Direct-v0 |
Direct |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
|
Isaac-Repose-Cube-Allegro-NoVelObs-v0 |
Isaac-Repose-Cube-Allegro-NoVelObs-Play-v0 |
Manager Based |
rsl_rl (PPO), rl_games (PPO), skrl (PPO) |
Isaac-Repose-Cube-Allegro-v0 |
Isaac-Repose-Cube-Allegro-Play-v0 |
Manager Based |
rsl_rl (PPO), rl_games (PPO), skrl (PPO) |
Isaac-Repose-Cube-Shadow-Direct-v0 |
Direct |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
|
Isaac-Repose-Cube-Shadow-OpenAI-FF-Direct-v0 |
Direct |
rl_games (FF), rsl_rl (PPO), skrl (PPO) |
|
Isaac-Repose-Cube-Shadow-OpenAI-LSTM-Direct-v0 |
Direct |
rl_games (LSTM) |
|
Isaac-Repose-Cube-Shadow-Vision-Direct-v0 (Requires running with |
Isaac-Repose-Cube-Shadow-Vision-Direct-Play-v0 (Requires running with |
Direct |
rsl_rl (PPO), rl_games (VISION) |
Isaac-Shadow-Hand-Over-Direct-v0 |
Direct |
rl_games (PPO), skrl (IPPO, PPO, MAPPO) |
|
Isaac-Stack-Cube-Franka-IK-Rel-v0 |
Manager Based |
||
Isaac-Dexsuite-Kuka-Allegro-Lift-v0 |
Isaac-Dexsuite-Kuka-Allegro-Lift-Play-v0 |
Manager Based |
rl_games (PPO), rsl_rl (PPO) |
Isaac-Dexsuite-Kuka-Allegro-Reorient-v0 |
Isaac-Dexsuite-Kuka-Allegro-Reorient-Play-v0 |
Manager Based |
rl_games (PPO), rsl_rl (PPO) |
Isaac-Stack-Cube-Franka-v0 |
Manager Based |
||
Isaac-Stack-Cube-Instance-Randomize-Franka-IK-Rel-v0 |
Manager Based |
||
Isaac-Stack-Cube-Instance-Randomize-Franka-v0 |
Manager Based |
||
Isaac-PickPlace-G1-InspireFTP-Abs-v0 |
Manager Based |
||
Isaac-Stack-Cube-UR10-Long-Suction-IK-Rel-v0 |
Manager Based |
||
Isaac-Stack-Cube-UR10-Short-Suction-IK-Rel-v0 |
Manager Based |
||
Isaac-Stack-Cube-Galbot-Left-Arm-Gripper-RmpFlow-v0 |
Manager Based |
||
Isaac-Stack-Cube-Galbot-Right-Arm-Suction-RmpFlow-v0 |
Manager Based |
||
Isaac-Stack-Cube-Galbot-Left-Arm-Gripper-Visuomotor-v0 |
Isaac-Stack-Cube-Galbot-Left-Arm-Gripper-Visuomotor-Play-v0 |
Manager Based |
|
Isaac-Place-Mug-Agibot-Left-Arm-RmpFlow-v0 |
Manager Based |
||
Isaac-Place-Toy2Box-Agibot-Right-Arm-RmpFlow-v0 |
Manager Based |
||
Isaac-Stack-Cube-Galbot-Left-Arm-Gripper-RmpFlow-v0 |
Manager Based |
||
Isaac-Stack-Cube-Galbot-Right-Arm-Suction-RmpFlow-v0 |
Manager Based |
||
Isaac-Stack-Cube-Galbot-Left-Arm-Gripper-Visuomotor-v0 |
Isaac-Stack-Cube-Galbot-Left-Arm-Gripper-Visuomotor-Play-v0 |
Manager Based |
|
Isaac-Place-Mug-Agibot-Left-Arm-RmpFlow-v0 |
Manager Based |
||
Isaac-Place-Toy2Box-Agibot-Right-Arm-RmpFlow-v0 |
Manager Based |
||
Isaac-Velocity-Flat-Anymal-B-v0 |
Isaac-Velocity-Flat-Anymal-B-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Flat-Anymal-C-Direct-v0 |
Direct |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
|
Isaac-Velocity-Flat-Anymal-C-v0 |
Isaac-Velocity-Flat-Anymal-C-Play-v0 |
Manager Based |
rsl_rl (PPO), rl_games (PPO), skrl (PPO) |
Isaac-Velocity-Flat-Anymal-D-v0 |
Isaac-Velocity-Flat-Anymal-D-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Flat-Cassie-v0 |
Isaac-Velocity-Flat-Cassie-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Flat-Digit-v0 |
Isaac-Velocity-Flat-Digit-Play-v0 |
Manager Based |
rsl_rl (PPO) |
Isaac-Velocity-Flat-G1-v0 |
Isaac-Velocity-Flat-G1-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Flat-H1-v0 |
Isaac-Velocity-Flat-H1-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Flat-Spot-v0 |
Isaac-Velocity-Flat-Spot-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Flat-Unitree-A1-v0 |
Isaac-Velocity-Flat-Unitree-A1-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO), sb3 (PPO) |
Isaac-Velocity-Flat-Unitree-Go1-v0 |
Isaac-Velocity-Flat-Unitree-Go1-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Flat-Unitree-Go2-v0 |
Isaac-Velocity-Flat-Unitree-Go2-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Rough-Anymal-B-v0 |
Isaac-Velocity-Rough-Anymal-B-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Rough-Anymal-C-Direct-v0 |
Direct |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
|
Isaac-Velocity-Rough-Anymal-C-v0 |
Isaac-Velocity-Rough-Anymal-C-Play-v0 |
Manager Based |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Rough-Anymal-D-v0 |
Isaac-Velocity-Rough-Anymal-D-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Rough-Cassie-v0 |
Isaac-Velocity-Rough-Cassie-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Rough-Digit-v0 |
Isaac-Velocity-Rough-Digit-Play-v0 |
Manager Based |
rsl_rl (PPO) |
Isaac-Velocity-Rough-G1-v0 |
Isaac-Velocity-Rough-G1-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Rough-H1-v0 |
Isaac-Velocity-Rough-H1-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Rough-Unitree-A1-v0 |
Isaac-Velocity-Rough-Unitree-A1-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO), sb3 (PPO) |
Isaac-Velocity-Rough-Unitree-Go1-v0 |
Isaac-Velocity-Rough-Unitree-Go1-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Rough-Unitree-Go2-v0 |
Isaac-Velocity-Rough-Unitree-Go2-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Reach-OpenArm-Bi-v0 |
Isaac-Reach-OpenArm-Bi-Play-v0 |
Manager Based |
rsl_rl (PPO), rl_games (PPO) |
Isaac-Reach-OpenArm-v0 |
Isaac-Reach-OpenArm-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO), rl_games (PPO) |
Isaac-Lift-Cube-OpenArm-v0 |
Isaac-Lift-Cube-OpenArm-Play-v0 |
Manager Based |
rsl_rl (PPO), rl_games (PPO) |
Isaac-Open-Drawer-OpenArm-v0 |
Isaac-Open-Drawer-OpenArm-Play-v0 |
Manager Based |
rsl_rl (PPO), rl_games (PPO) |