Interacting with a deformable object#
While deformable objects sometimes refer to a broader class of objects, such as cloths, fluids and soft bodies, in PhysX, deformable objects syntactically correspond to soft bodies. Unlike rigid objects, soft bodies can deform under external forces and collisions.
Soft bodies are simulated using Finite Element Method (FEM) in PhysX. The soft body comprises of two tetrahedral meshes – a simulation mesh and a collision mesh. The simulation mesh is used to simulate the deformations of the soft body, while the collision mesh is used to detect collisions with other objects in the scene. For more details, please check the PhysX documentation.
This tutorial shows how to interact with a deformable object in the simulation. We will spawn a set of soft cubes and see how to set their nodal positions and velocities, along with apply kinematic commands to the mesh nodes to move the soft body.
The Code#
The tutorial corresponds to the run_deformable_object.py script in the scripts/tutorials/01_assets directory.
Code for run_deformable_object.py
1# Copyright (c) 2022-2026, The Isaac Lab Project Developers (https://github.com/isaac-sim/IsaacLab/blob/main/CONTRIBUTORS.md).
2# All rights reserved.
3#
4# SPDX-License-Identifier: BSD-3-Clause
5
6"""
7This script demonstrates how to work with the deformable object and interact with it.
8
9.. code-block:: bash
10
11 # Usage
12 ./isaaclab.sh -p scripts/tutorials/01_assets/run_deformable_object.py
13
14"""
15
16"""Launch Isaac Sim Simulator first."""
17
18
19import argparse
20
21from isaaclab.app import AppLauncher
22
23# add argparse arguments
24parser = argparse.ArgumentParser(description="Tutorial on interacting with a deformable object.")
25# append AppLauncher cli args
26AppLauncher.add_app_launcher_args(parser)
27# parse the arguments
28args_cli = parser.parse_args()
29
30# launch omniverse app
31app_launcher = AppLauncher(args_cli)
32simulation_app = app_launcher.app
33
34"""Rest everything follows."""
35
36import torch
37
38import isaaclab.sim as sim_utils
39import isaaclab.utils.math as math_utils
40from isaaclab.assets import DeformableObject, DeformableObjectCfg
41from isaaclab.sim import SimulationContext
42
43
44def design_scene():
45 """Designs the scene."""
46 # Ground-plane
47 cfg = sim_utils.GroundPlaneCfg()
48 cfg.func("/World/defaultGroundPlane", cfg)
49 # Lights
50 cfg = sim_utils.DomeLightCfg(intensity=2000.0, color=(0.8, 0.8, 0.8))
51 cfg.func("/World/Light", cfg)
52
53 # Create separate groups called "Origin1", "Origin2", "Origin3"
54 # Each group will have a robot in it
55 origins = [[0.25, 0.25, 0.0], [-0.25, 0.25, 0.0], [0.25, -0.25, 0.0], [-0.25, -0.25, 0.0]]
56 for i, origin in enumerate(origins):
57 sim_utils.create_prim(f"/World/Origin{i}", "Xform", translation=origin)
58
59 # Deformable Object
60 cfg = DeformableObjectCfg(
61 prim_path="/World/Origin.*/Cube",
62 spawn=sim_utils.MeshCuboidCfg(
63 size=(0.2, 0.2, 0.2),
64 deformable_props=sim_utils.DeformableBodyPropertiesCfg(rest_offset=0.0, contact_offset=0.001),
65 visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(0.5, 0.1, 0.0)),
66 physics_material=sim_utils.DeformableBodyMaterialCfg(poissons_ratio=0.4, youngs_modulus=1e5),
67 ),
68 init_state=DeformableObjectCfg.InitialStateCfg(pos=(0.0, 0.0, 1.0)),
69 debug_vis=True,
70 )
71 cube_object = DeformableObject(cfg=cfg)
72
73 # return the scene information
74 scene_entities = {"cube_object": cube_object}
75 return scene_entities, origins
76
77
78def run_simulator(sim: sim_utils.SimulationContext, entities: dict[str, DeformableObject], origins: torch.Tensor):
79 """Runs the simulation loop."""
80 # Extract scene entities
81 # note: we only do this here for readability. In general, it is better to access the entities directly from
82 # the dictionary. This dictionary is replaced by the InteractiveScene class in the next tutorial.
83 cube_object = entities["cube_object"]
84 # Define simulation stepping
85 sim_dt = sim.get_physics_dt()
86 sim_time = 0.0
87 count = 0
88
89 # Nodal kinematic targets of the deformable bodies
90 nodal_kinematic_target = cube_object.data.nodal_kinematic_target.clone()
91
92 # Simulate physics
93 while simulation_app.is_running():
94 # reset
95 if count % 250 == 0:
96 # reset counters
97 sim_time = 0.0
98 count = 0
99
100 # reset the nodal state of the object
101 nodal_state = cube_object.data.default_nodal_state_w.clone()
102 # apply random pose to the object
103 pos_w = torch.rand(cube_object.num_instances, 3, device=sim.device) * 0.1 + origins
104 quat_w = math_utils.random_orientation(cube_object.num_instances, device=sim.device)
105 nodal_state[..., :3] = cube_object.transform_nodal_pos(nodal_state[..., :3], pos_w, quat_w)
106
107 # write nodal state to simulation
108 cube_object.write_nodal_state_to_sim(nodal_state)
109
110 # Write the nodal state to the kinematic target and free all vertices
111 nodal_kinematic_target[..., :3] = nodal_state[..., :3]
112 nodal_kinematic_target[..., 3] = 1.0
113 cube_object.write_nodal_kinematic_target_to_sim(nodal_kinematic_target)
114
115 # reset buffers
116 cube_object.reset()
117
118 print("----------------------------------------")
119 print("[INFO]: Resetting object state...")
120
121 # update the kinematic target for cubes at index 0 and 3
122 # we slightly move the cube in the z-direction by picking the vertex at index 0
123 nodal_kinematic_target[[0, 3], 0, 2] += 0.001
124 # set vertex at index 0 to be kinematically constrained
125 # 0: constrained, 1: free
126 nodal_kinematic_target[[0, 3], 0, 3] = 0.0
127 # write kinematic target to simulation
128 cube_object.write_nodal_kinematic_target_to_sim(nodal_kinematic_target)
129
130 # write internal data to simulation
131 cube_object.write_data_to_sim()
132 # perform step
133 sim.step()
134 # update sim-time
135 sim_time += sim_dt
136 count += 1
137 # update buffers
138 cube_object.update(sim_dt)
139 # print the root position
140 if count % 50 == 0:
141 print(f"Root position (in world): {cube_object.data.root_pos_w[:, :3]}")
142
143
144def main():
145 """Main function."""
146 # Load kit helper
147 sim_cfg = sim_utils.SimulationCfg(device=args_cli.device)
148 sim = SimulationContext(sim_cfg)
149 # Set main camera
150 sim.set_camera_view(eye=[3.0, 0.0, 1.0], target=[0.0, 0.0, 0.5])
151 # Design scene
152 scene_entities, scene_origins = design_scene()
153 scene_origins = torch.tensor(scene_origins, device=sim.device)
154 # Play the simulator
155 sim.reset()
156 # Now we are ready!
157 print("[INFO]: Setup complete...")
158 # Run the simulator
159 run_simulator(sim, scene_entities, scene_origins)
160
161
162if __name__ == "__main__":
163 # run the main function
164 main()
165 # close sim app
166 simulation_app.close()
The Code Explained#
Designing the scene#
Similar to the Interacting with a rigid object tutorial, we populate the scene with a ground plane
and a light source. In addition, we add a deformable object to the scene using the assets.DeformableObject
class. This class is responsible for spawning the prims at the input path and initializes their corresponding
deformable body physics handles.
In this tutorial, we create a cubical soft object using the spawn configuration similar to the deformable cube
in the Spawn Objects tutorial. The only difference is that now we wrap
the spawning configuration into the assets.DeformableObjectCfg class. This class contains information about
the asset’s spawning strategy and default initial state. When this class is passed to
the assets.DeformableObject class, it spawns the object and initializes the corresponding physics handles
when the simulation is played.
Note
The deformable object is only supported in GPU simulation and requires a mesh object to be spawned with the deformable body physics properties on it.
As seen in the rigid body tutorial, we can spawn the deformable object into the scene in a similar fashion by creating
an instance of the assets.DeformableObject class by passing the configuration object to its constructor.
# Create separate groups called "Origin1", "Origin2", "Origin3"
# Each group will have a robot in it
origins = [[0.25, 0.25, 0.0], [-0.25, 0.25, 0.0], [0.25, -0.25, 0.0], [-0.25, -0.25, 0.0]]
for i, origin in enumerate(origins):
sim_utils.create_prim(f"/World/Origin{i}", "Xform", translation=origin)
# Deformable Object
cfg = DeformableObjectCfg(
prim_path="/World/Origin.*/Cube",
spawn=sim_utils.MeshCuboidCfg(
size=(0.2, 0.2, 0.2),
deformable_props=sim_utils.DeformableBodyPropertiesCfg(rest_offset=0.0, contact_offset=0.001),
visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(0.5, 0.1, 0.0)),
physics_material=sim_utils.DeformableBodyMaterialCfg(poissons_ratio=0.4, youngs_modulus=1e5),
),
init_state=DeformableObjectCfg.InitialStateCfg(pos=(0.0, 0.0, 1.0)),
debug_vis=True,
)
cube_object = DeformableObject(cfg=cfg)
Running the simulation loop#
Continuing from the rigid body tutorial, we reset the simulation at regular intervals, apply kinematic commands to the deformable body, step the simulation, and update the deformable object’s internal buffers.
Resetting the simulation state#
Unlike rigid bodies and articulations, deformable objects have a different state representation. The state of a
deformable object is defined by the nodal positions and velocities of the mesh. The nodal positions and velocities
are defined in the simulation world frame and are stored in the assets.DeformableObject.data attribute.
We use the assets.DeformableObject.data.default_nodal_state_w attribute to get the default nodal state of the
spawned object prims. This default state can be configured from the assets.DeformableObjectCfg.init_state
attribute, which we left as identity in this tutorial.
Attention
The initial state in the configuration assets.DeformableObjectCfg specifies the pose
of the deformable object at the time of spawning. Based on this initial state, the default nodal state is
obtained when the simulation is played for the first time.
We apply transformations to the nodal positions to randomize the initial state of the deformable object.
# reset the nodal state of the object
nodal_state = cube_object.data.default_nodal_state_w.clone()
# apply random pose to the object
pos_w = torch.rand(cube_object.num_instances, 3, device=sim.device) * 0.1 + origins
quat_w = math_utils.random_orientation(cube_object.num_instances, device=sim.device)
nodal_state[..., :3] = cube_object.transform_nodal_pos(nodal_state[..., :3], pos_w, quat_w)
To reset the deformable object, we first set the nodal state by calling the assets.DeformableObject.write_nodal_state_to_sim()
method. This method writes the nodal state of the deformable object prim into the simulation buffer.
Additionally, we free all the kinematic targets set for the nodes in the previous simulation step by calling
the assets.DeformableObject.write_nodal_kinematic_target_to_sim() method. We explain the
kinematic targets in the next section.
Finally, we call the assets.DeformableObject.reset() method to reset any internal buffers and caches.
# write nodal state to simulation
cube_object.write_nodal_state_to_sim(nodal_state)
# Write the nodal state to the kinematic target and free all vertices
nodal_kinematic_target[..., :3] = nodal_state[..., :3]
nodal_kinematic_target[..., 3] = 1.0
cube_object.write_nodal_kinematic_target_to_sim(nodal_kinematic_target)
# reset buffers
cube_object.reset()
Stepping the simulation#
Deformable bodies support user-driven kinematic control where a user can specify position targets for some of the mesh nodes while the rest of the nodes are simulated using the FEM solver. This partial kinematic control is useful for applications where the user wants to interact with the deformable object in a controlled manner.
In this tutorial, we apply kinematic commands to two out of the four cubes in the scene. We set the position targets for the node at index 0 (bottom-left corner) to move the cube along the z-axis.
At every step, we increment the kinematic position target for the node by a small value. Additionally,
we set the flag to indicate that the target is a kinematic target for that node in the simulation buffer.
These are set into the simulation buffer by calling the assets.DeformableObject.write_nodal_kinematic_target_to_sim()
method.
# update the kinematic target for cubes at index 0 and 3
# we slightly move the cube in the z-direction by picking the vertex at index 0
nodal_kinematic_target[[0, 3], 0, 2] += 0.001
# set vertex at index 0 to be kinematically constrained
# 0: constrained, 1: free
nodal_kinematic_target[[0, 3], 0, 3] = 0.0
# write kinematic target to simulation
cube_object.write_nodal_kinematic_target_to_sim(nodal_kinematic_target)
Similar to the rigid object and articulation, we perform the assets.DeformableObject.write_data_to_sim() method
before stepping the simulation. For deformable objects, this method does not apply any external forces to the object.
However, we keep this method for completeness and future extensions.
# write internal data to simulation
cube_object.write_data_to_sim()
Updating the state#
After stepping the simulation, we update the internal buffers of the deformable object prims to reflect their new state
inside the assets.DeformableObject.data attribute. This is done using the assets.DeformableObject.update() method.
At a fixed interval, we print the root position of the deformable object to the terminal. As mentioned earlier, there is no concept of a root state for deformable objects. However, we compute the root position as the average position of all the nodes in the mesh.
# update buffers
cube_object.update(sim_dt)
# print the root position
if count % 50 == 0:
print(f"Root position (in world): {cube_object.data.root_pos_w[:, :3]}")
The Code Execution#
Now that we have gone through the code, let’s run the script and see the result:
./isaaclab.sh -p scripts/tutorials/01_assets/run_deformable_object.py
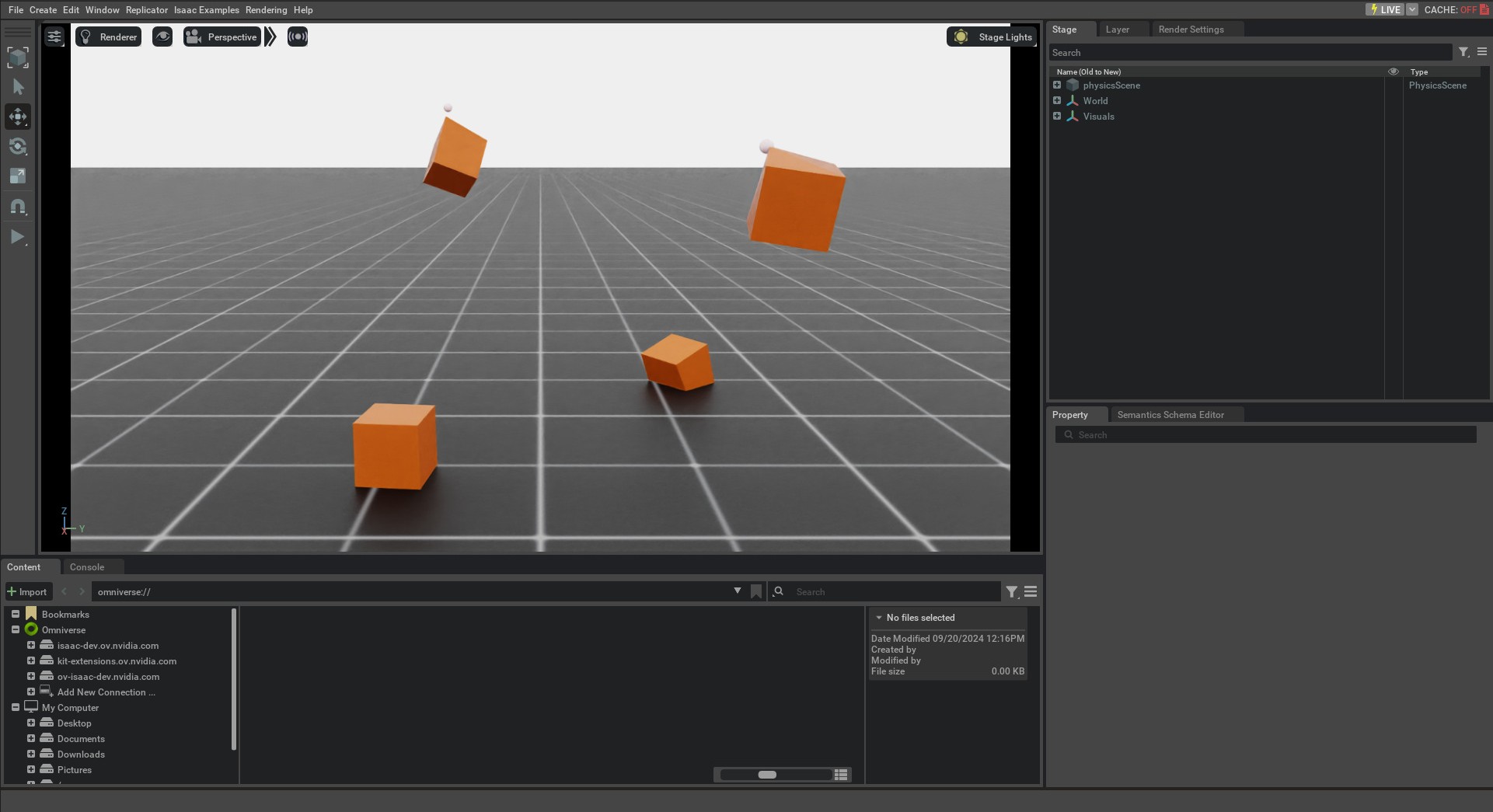
This should open a stage with a ground plane, lights, and several green cubes. Two of the four cubes must be dropping
from a height and settling on to the ground. Meanwhile the other two cubes must be moving along the z-axis. You
should see a marker showing the kinematic target position for the nodes at the bottom-left corner of the cubes.
To stop the simulation, you can either close the window, or press Ctrl+C in the terminal
This tutorial showed how to spawn deformable objects and wrap them in a DeformableObject class to initialize their
physics handles which allows setting and obtaining their state. We also saw how to apply kinematic commands to the
deformable object to move the mesh nodes in a controlled manner. In the next tutorial, we will see how to create
a scene using the InteractiveScene class.