Task#
A task defines what the robot is supposed to do in the environment. Concretely, a task specifies four things:
Success condition — when has the robot completed the task? (e.g. is the door open?)
Failure condition — when should the episode end early? (e.g. has the object fallen off the table?)
Reset action — how should the scene be restored at the start of each episode? (e.g. close the door)
Metrics — what should be measured? (e.g. how far open did the microwave get?)
microwave = asset_registry.get_asset_by_name("microwave")()
task = OpenDoorTask(openable_object=microwave)
environment = IsaacLabArenaEnvironment(
name="open_microwave",
embodiment=embodiment,
scene=scene,
task=task,
)
Tasks and affordances#
Tasks are defined in terms of object affordances, not specific objects.
OpenDoorTask takes any Openable — a microwave, a fridge, a cabinet.
Its success condition calls openable.is_open(), its reset calls openable.close(),
and its metric tracks openable.get_openness().
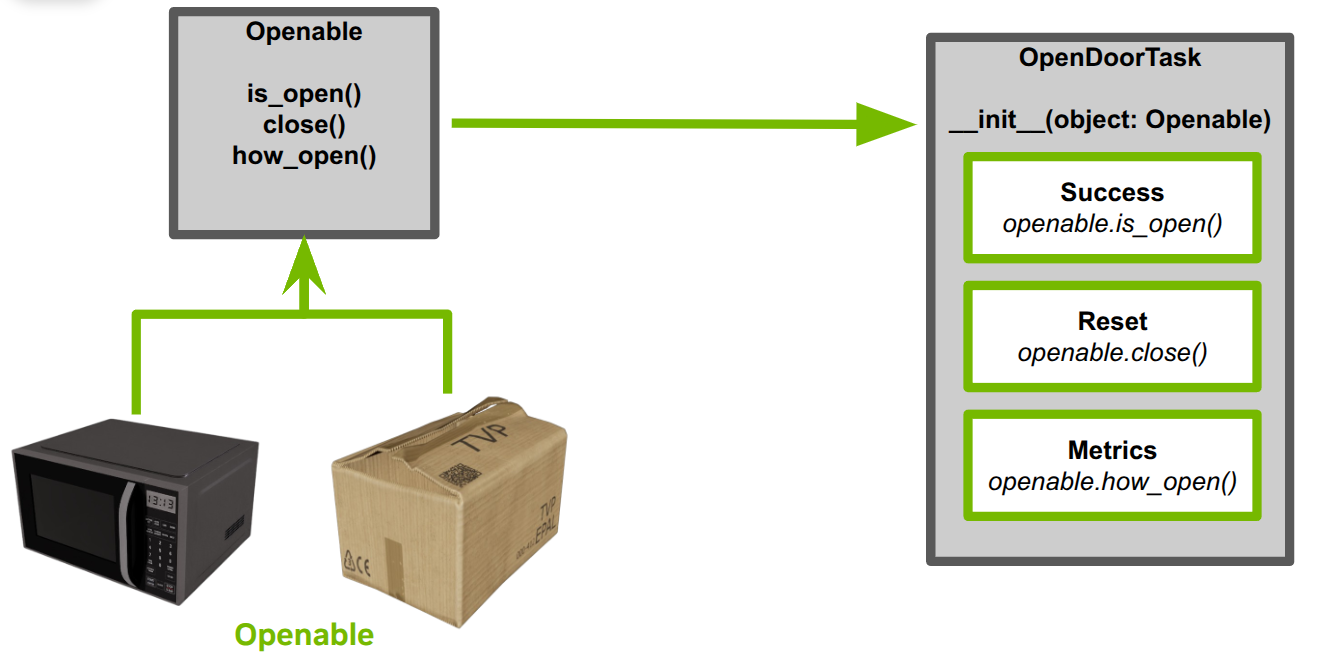
OpenDoorTask is defined entirely in terms of the Openable affordance interface,
making it reusable with any openable object.#
This is what makes tasks modular — the same task works across different objects and scenes without any changes.
Available tasks include (but are not limited to) PickAndPlaceTask, LiftObjectTask,
OpenDoorTask, CloseDoorTask, and PressButtonTask.