Affordances#
An affordance is an interaction that an object makes available to the robot — opening a door, pressing a button, turning a knob. By attaching affordances to objects, Arena gives tasks a standard interface to interact with them, regardless of the specific object.
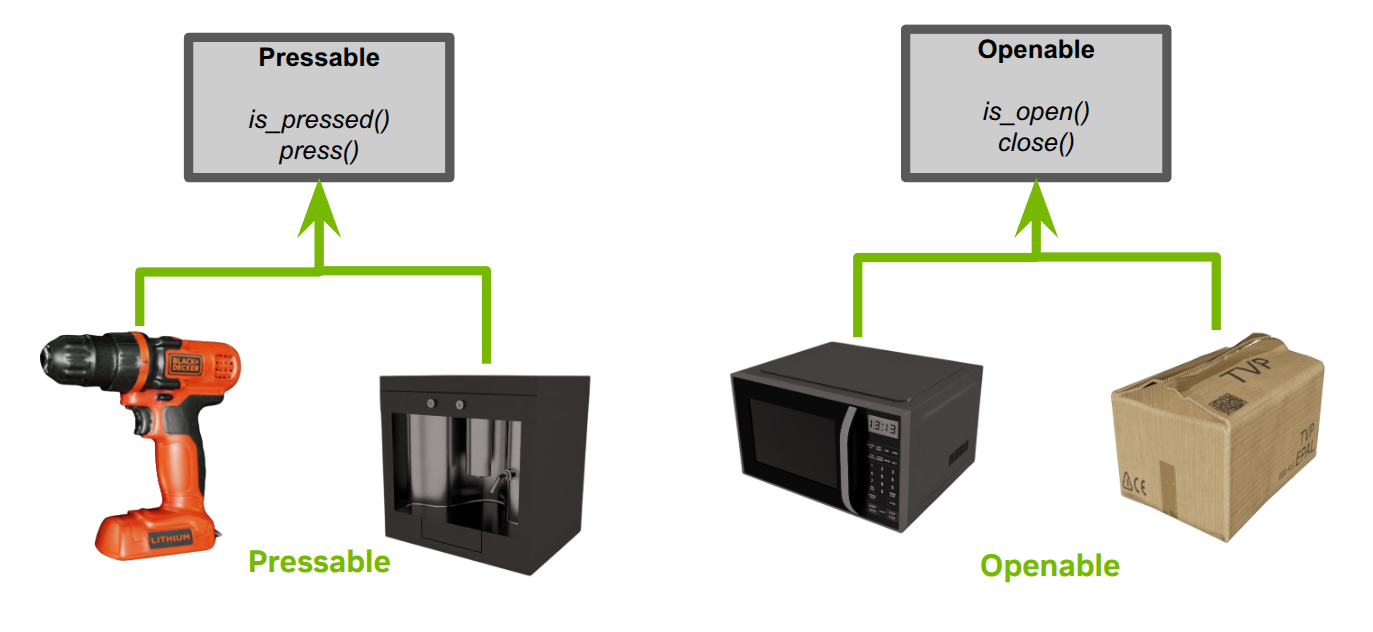
Two examples of affordances. A drill and coffee machine are Pressable
(is_pressed(), press()); a microwave and cardboard box are Openable
(is_open(), close()).#
How an object gets an affordance#
Affordances are added to an object through multiple inheritance.
The microwave inherits from both LibraryObject and Openable,
and declares the joint name that the affordance controls:
@register_asset
class Microwave(LibraryObject, Openable):
name = "microwave"
tags = ["object", "openable"]
object_type = ObjectType.ARTICULATION
# Openable affordance parameters
openable_joint_name = "microjoint"
openable_threshold = 0.5 # open if joint > threshold, closed otherwise
The Openable mixin implements is_open() and close() using the joint
name provided — no further setup needed.
Why this matters#
Because tasks are written against the affordance interface rather than a specific object,
the same task works with any object that has the right affordance.
OpenDoorTask works with the microwave, a fridge, a cabinet — any Openable.
This is what makes tasks modular and reusable across different scenes.