Developer’s Guide#
For development, we suggest using Microsoft Visual Studio Code (VSCode). This is also suggested by NVIDIA Omniverse and there exists tutorials on how to debug Omniverse extensions using VSCode.
Setting up Visual Studio Code#
The following is only applicable for Isaac Sim installed via the Omniverse Launcher.
The Isaac Lab repository includes the VSCode settings to easily allow setting
up your development environment. These are included in the .vscode directory
and include the following files:
.vscode
├── tools
│ ├── launch.template.json
│ ├── settings.template.json
│ └── setup_vscode.py
├── extensions.json
├── launch.json # <- this is generated by setup_vscode.py
├── settings.json # <- this is generated by setup_vscode.py
└── tasks.json
To setup the IDE, please follow these instructions:
Open the
Isaac Labdirectory on Visual Studio Code IDERun VSCode Tasks, by pressing
Ctrl+Shift+P, selectingTasks: Run Taskand running thesetup_python_envin the drop down menu.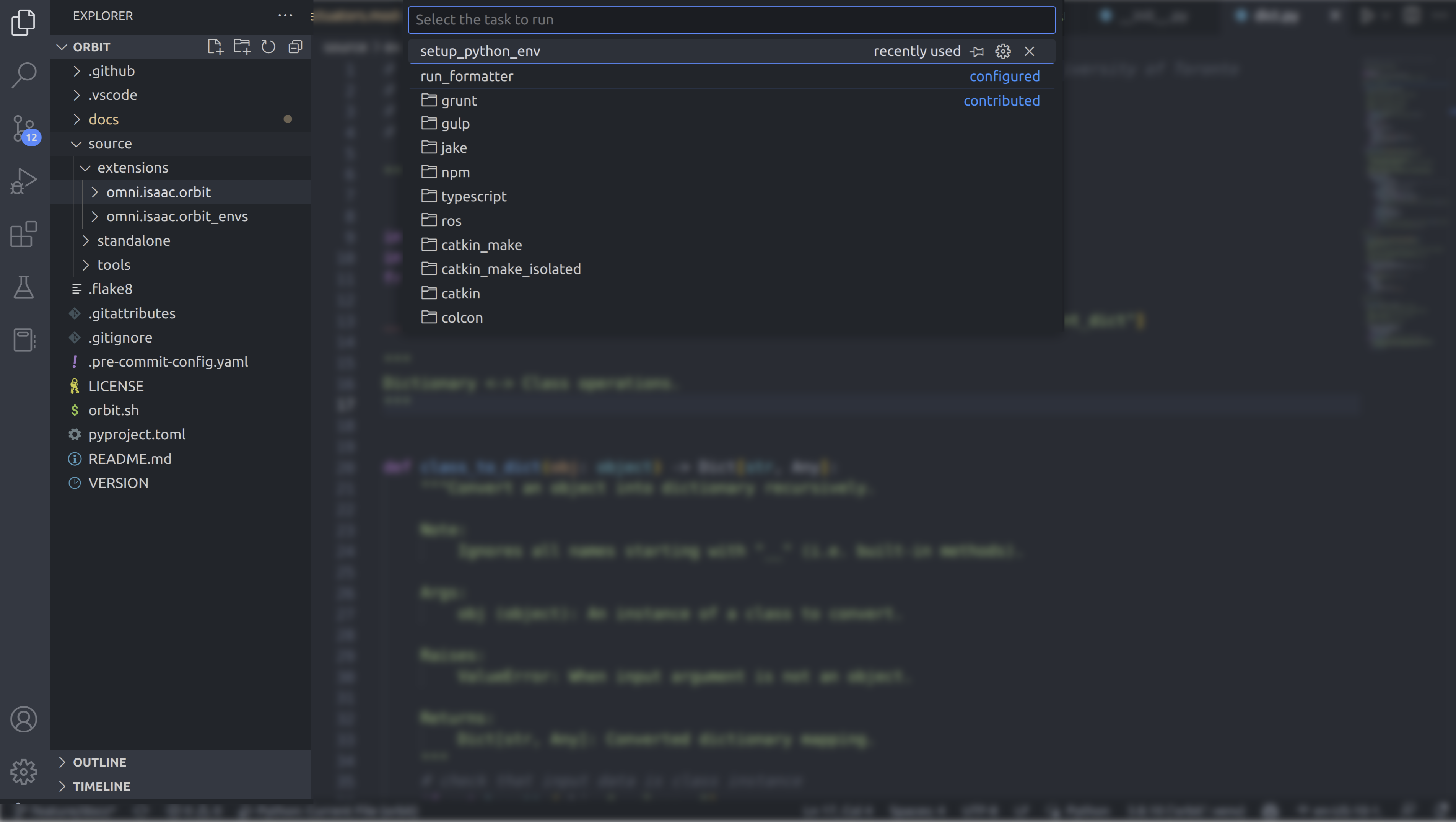
If everything executes correctly, it should create a file
.python.env in the .vscode directory. The file contains the python
paths to all the extensions provided by Isaac Sim and Omniverse. This helps
in indexing all the python modules for intelligent suggestions while writing
code.
For more information on VSCode support for Omniverse, please refer to the following links:
Configuring the python interpreter#
In the provided configuration, we set the default python interpreter to use the
python executable provided by Omniverse. This is specified in the
.vscode/settings.json file:
{
"python.defaultInterpreterPath": "${workspaceFolder}/_isaac_sim/kit/python/bin/python3",
"python.envFile": "${workspaceFolder}/.vscode/.python.env",
}
If you want to use a different python interpreter (for instance, from your conda environment),
you need to change the python interpreter used by selecting and activating the python interpreter
of your choice in the bottom left corner of VSCode, or opening the command palette (Ctrl+Shift+P)
and selecting Python: Select Interpreter.
For more information on how to set python interpreter for VSCode, please refer to the VSCode documentation.
Repository organization#
The Isaac Lab repository is structured as follows:
IsaacLab
├── .vscode
├── .flake8
├── LICENSE
├── isaaclab.sh
├── pyproject.toml
├── README.md
├── docs
├── source
│ ├── extensions
│ │ ├── omni.isaac.lab
│ │ ├── omni.isaac.lab_assets
│ │ └── omni.isaac.lab_tasks
│ ├── standalone
│ │ ├── demos
│ │ ├── environments
│ │ ├── tools
│ │ ├── tutorials
│ │ └── workflows
└── VERSION
The source directory contains the source code for all Isaac Lab extensions
and standalone applications. The two are the different development workflows
supported in Isaac Sim.
These are described in the following sections.
Extensions#
Extensions are the recommended way to develop applications in Isaac Sim. They are
modularized packages that formulate the Omniverse ecosystem. Each extension
provides a set of functionalities that can be used by other extensions or
standalone applications. A folder is recognized as an extension if it contains
an extension.toml file in the config directory. More information on extensions can be found in the
Omniverse documentation.
Isaac Lab in itself provides extensions for robot learning. These are written into the
source/extensions directory. Each extension is written as a python package and
follows the following structure:
<extension-name>
├── config
│ └── extension.toml
├── docs
│ ├── CHANGELOG.md
│ └── README.md
├── <extension-name>
│ ├── __init__.py
│ ├── ....
│ └── scripts
├── setup.py
└── tests
The config/extension.toml file contains the metadata of the extension. This
includes the name, version, description, dependencies, etc. This information is used
by Omniverse to load the extension. The docs directory contains the documentation
for the extension with more detailed information about the extension and a CHANGELOG
file that contains the changes made to the extension in each version.
The <extension-name> directory contains the main python package for the extension.
It may also contains the scripts directory for keeping python-based applications
that are loaded into Omniverse when then extension is enabled using the
Extension Manager.
More specifically, when an extension is enabled, the python module specified in the
config/extension.toml file is loaded and scripts that contains children of the
omni.ext.IExt class are executed.
import omni.ext
class MyExt(omni.ext.IExt):
"""My extension application."""
def on_startup(self, ext_id):
"""Called when the extension is loaded."""
pass
def on_shutdown(self):
"""Called when the extension is unloaded.
It releases all references to the extension and cleans up any resources.
"""
pass
While loading extensions into Omniverse happens automatically, using the python package
in standalone applications requires additional steps. To simplify the build process and
avoiding the need to understand the premake
build system used by Omniverse, we directly use the setuptools
python package to build the python module provided by the extensions. This is done by the
setup.py file in the extension directory.
Note
The setup.py file is not required for extensions that are only loaded into Omniverse
using the Extension Manager.
Lastly, the tests directory contains the unit tests for the extension. These are written
using the unittest framework. It is
important to note that Omniverse also provides a similar
testing framework.
However, it requires going through the build process and does not support testing of the python module in
standalone applications.
Standalone applications#
In a typical Omniverse workflow, the simulator is launched first, after which the extensions are
enabled that load the python module and run the python application. While this is a recommended
workflow, it is not always possible to use this workflow. For example, for robot learning, it is
essential to have complete control over simulation stepping and all the other functionalities
instead of asynchronously waiting for the simulator to step. In such cases, it is necessary to
write a standalone application that launches the simulator using AppLauncher
and allows complete control over the simulation through the SimulationContext
class.
"""Launch Isaac Sim Simulator first."""
from omni.isaac.lab.app import AppLauncher
# launch omniverse app
app_launcher = AppLauncher(headless=False)
simulation_app = app_launcher.app
"""Rest everything follows."""
from omni.isaac.lab.sim import SimulationContext
if __name__ == "__main__":
# get simulation context
simulation_context = SimulationContext()
# reset and play simulation
simulation_context.reset()
# step simulation
simulation_context.step()
# stop simulation
simulation_context.stop()
# close the simulation
simulation_app.close()
The source/standalone directory contains various standalone applications designed using the extensions
provided by Isaac Lab. These applications are written in python and are structured as follows:
demos: Contains various demo applications that showcase the core framework
omni.isaac.lab.environments: Contains applications for running environments defined in
omni.isaac.lab_taskswith different agents. These include a random policy, zero-action policy, teleoperation or scripted state machines.tools: Contains applications for using the tools provided by the framework. These include converting assets, generating datasets, etc.
tutorials: Contains step-by-step tutorials for using the APIs provided by the framework.
workflows: Contains applications for using environments with various learning-based frameworks. These include different reinforcement learning or imitation learning libraries.