Concept Overview#
This section provides an overview of the core concepts in Isaac Lab Arena.
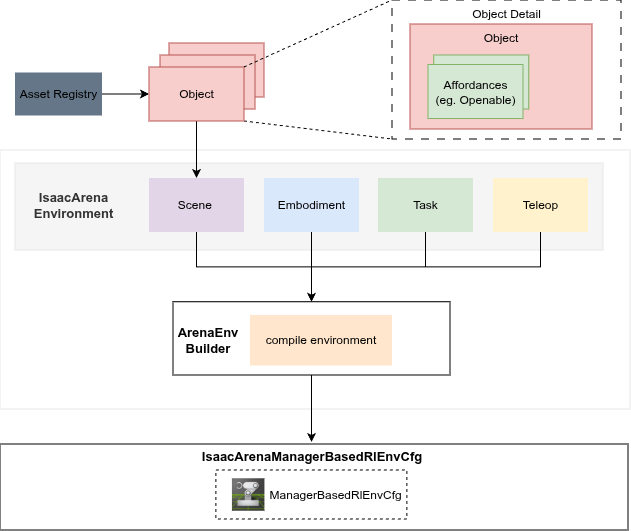
IsaacLab Arena Workflow Overview#
In the core of the workflow, we have three main components, Scene, Embodiment, and Task. We compile most of the managers of the manager-based RL environment from these three components. We strongly incline towards keeping these components as independent as possible. This allows us to reuse the components in different environments and tasks, thus making the framework more modular and easier to extend.
Embodiment
Embodiments define robot-specific configurations and behaviors. They provide a modular way to integrate different robots into environments, encapsulating kinematics, control actions, observations, terminations and camera systems. See Embodiment Design for more details.
Task
Tasks define objectives, success criteria, and behavior logic for environments. They provide configurations for termination conditions, event handling, metrics collection, and mimic components. See Tasks Design for more details.
Scene
Scenes manage collections of assets that define the physical environment for simulation. They provide a unified interface for composing backgrounds, objects, and interactive elements. See Scene Design for more details.
When combining these three components we create the observation, action, event, termination, metrics, mimic components of the manager-based RL environment. For more details on how to combine these components, see Environment Compilation Design.
Other components of interest are the Affordances and the Metrics.
Affordances
Affordances define what interactions objects can perform - opening doors, pressing buttons, manipulating objects. They provide standardized interfaces that integrate with tasks and embodiments. See Affordances Design for more details.
Metrics
Metrics define the performance evaluation metrics for the environment. Some metrics are independent of the task and the embodiment, such as the success rate metric, while others are task-specific, such as open door rate metric. See Metrics Design for more details.
These components together with teleoperation devices form the manager-based RL environment. See Environment Design for more details on how these components are easily combined to create our environments.