Showroom Demos#
The main core interface extension in Isaac Lab isaaclab provides
the main modules for actuators, objects, robots and sensors. We provide
a list of demo scripts and tutorials. These showcase how to use the provided
interfaces within a code in a minimal way.
A few quick showroom scripts to run and checkout:
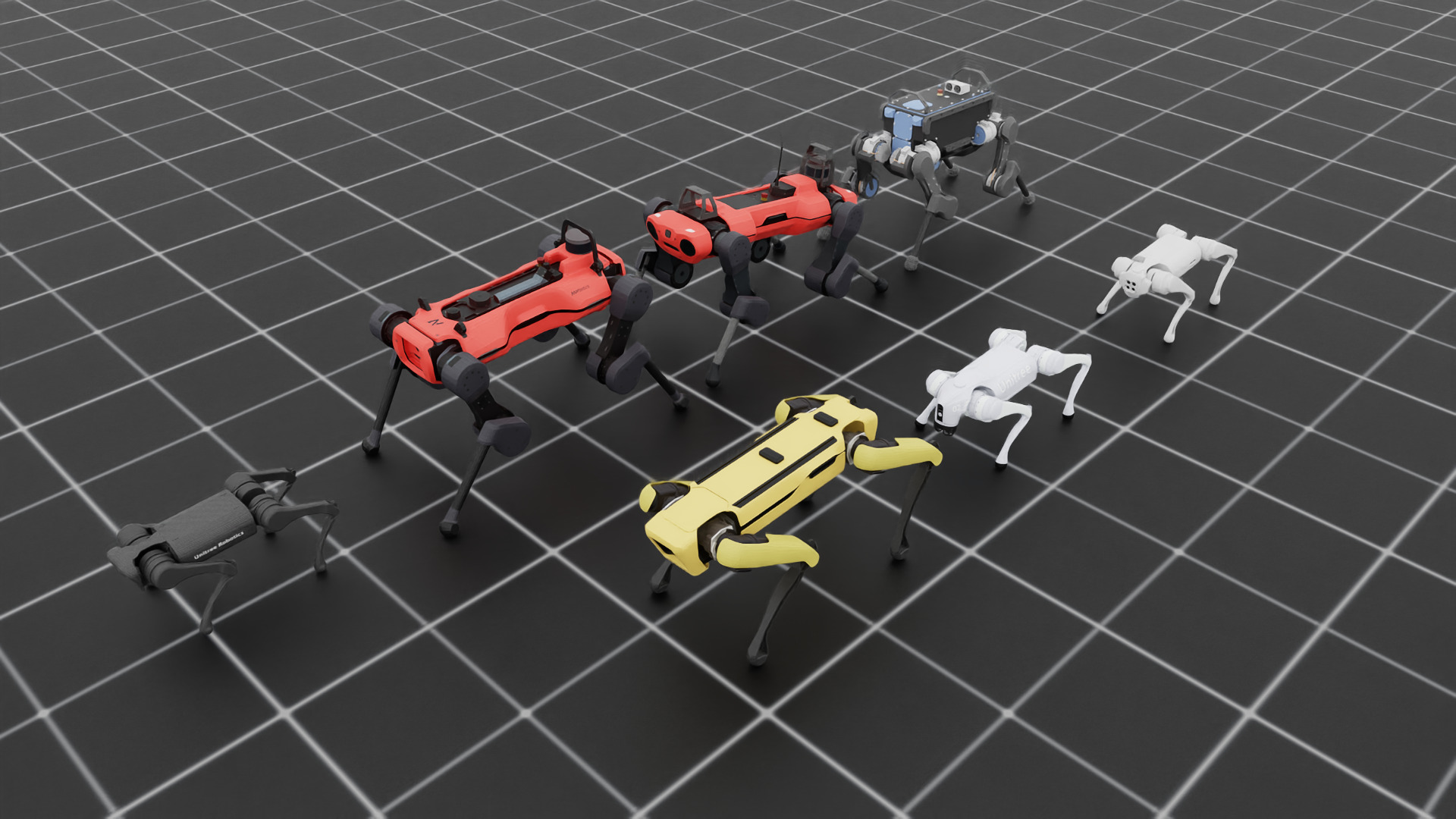
Spawn different quadrupeds and make robots stand using position commands:
./isaaclab.sh -p scripts/demos/quadrupeds.py
isaaclab.bat -p scripts\demos\quadrupeds.py
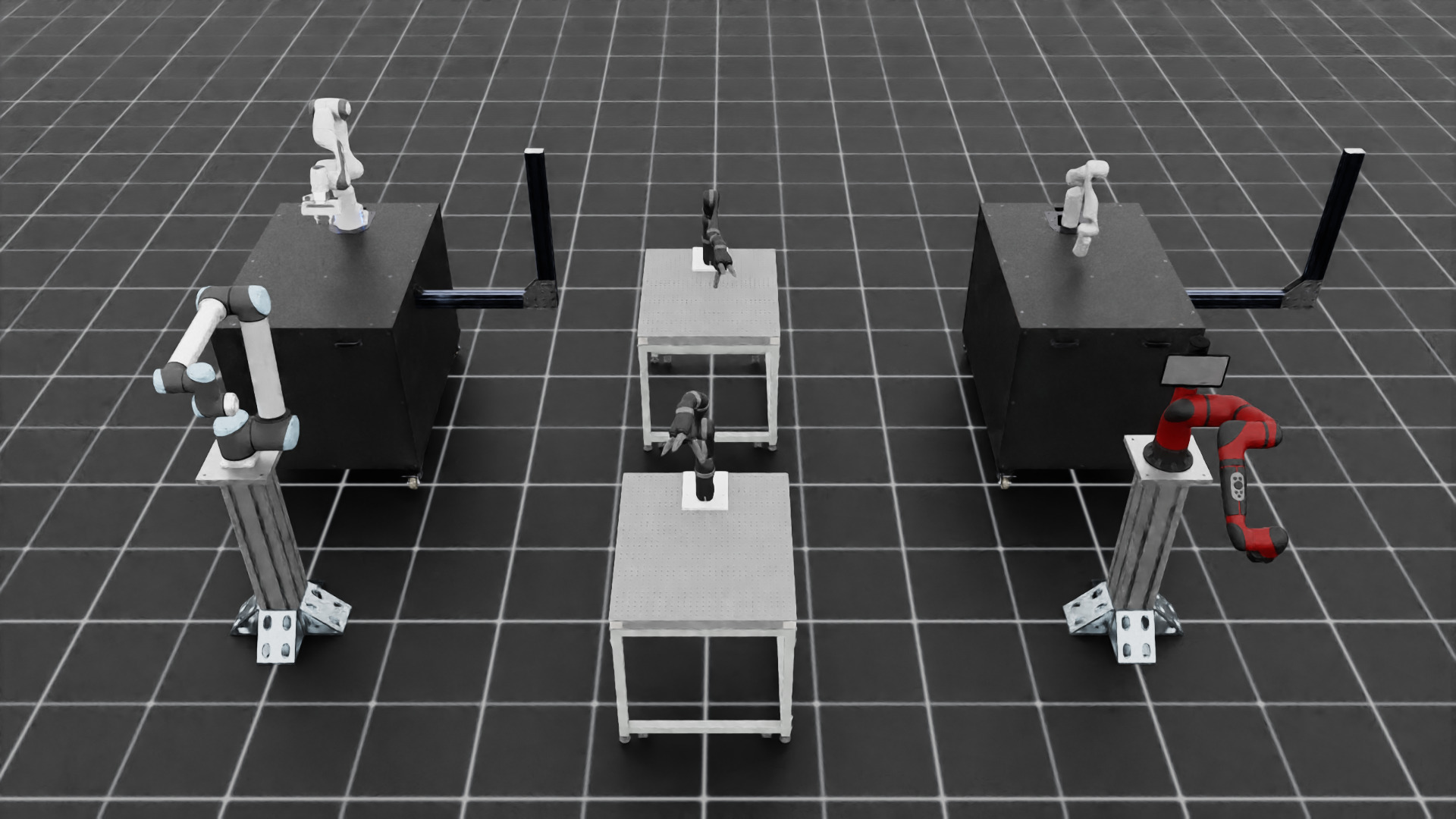
Spawn different arms and apply random joint position commands:
./isaaclab.sh -p scripts/demos/arms.py
isaaclab.bat -p scripts\demos\arms.py
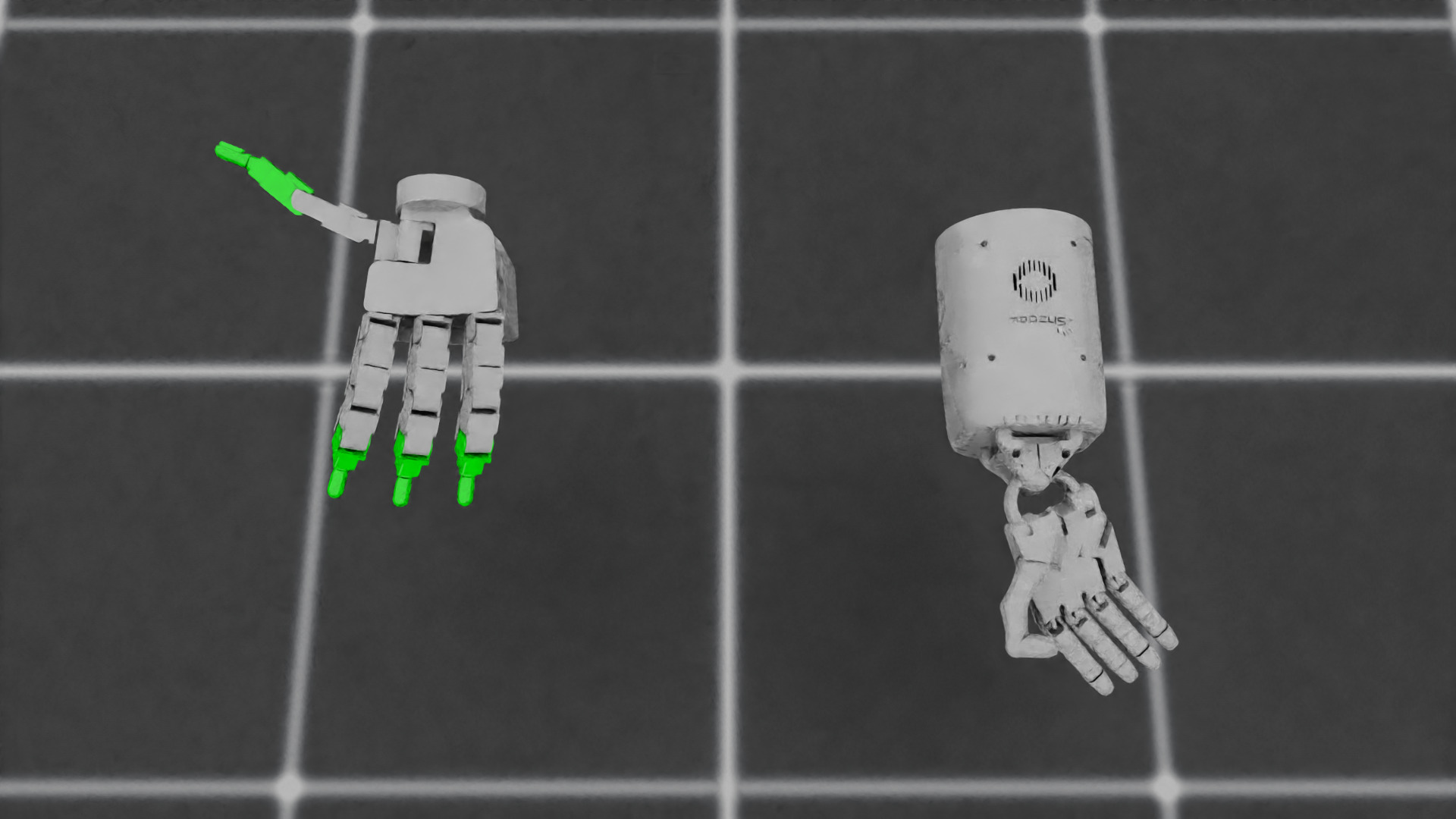
Spawn different hands and command them to open and close:
./isaaclab.sh -p scripts/demos/hands.py
isaaclab.bat -p scripts\demos\hands.py
Spawn different deformable (soft) bodies and let them fall from a height:
./isaaclab.sh -p scripts/demos/deformables.py
isaaclab.bat -p scripts\demos\deformables.py
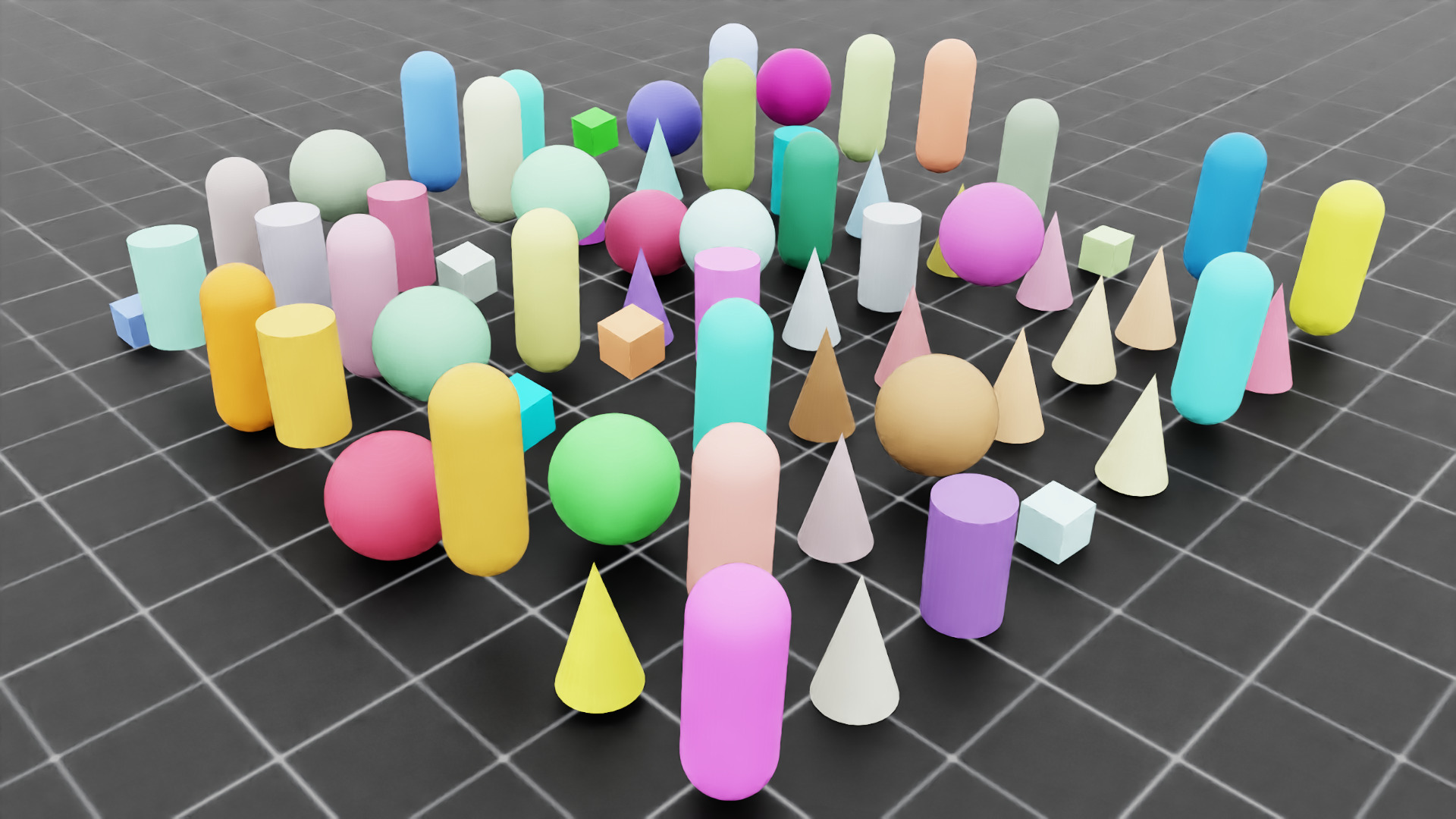
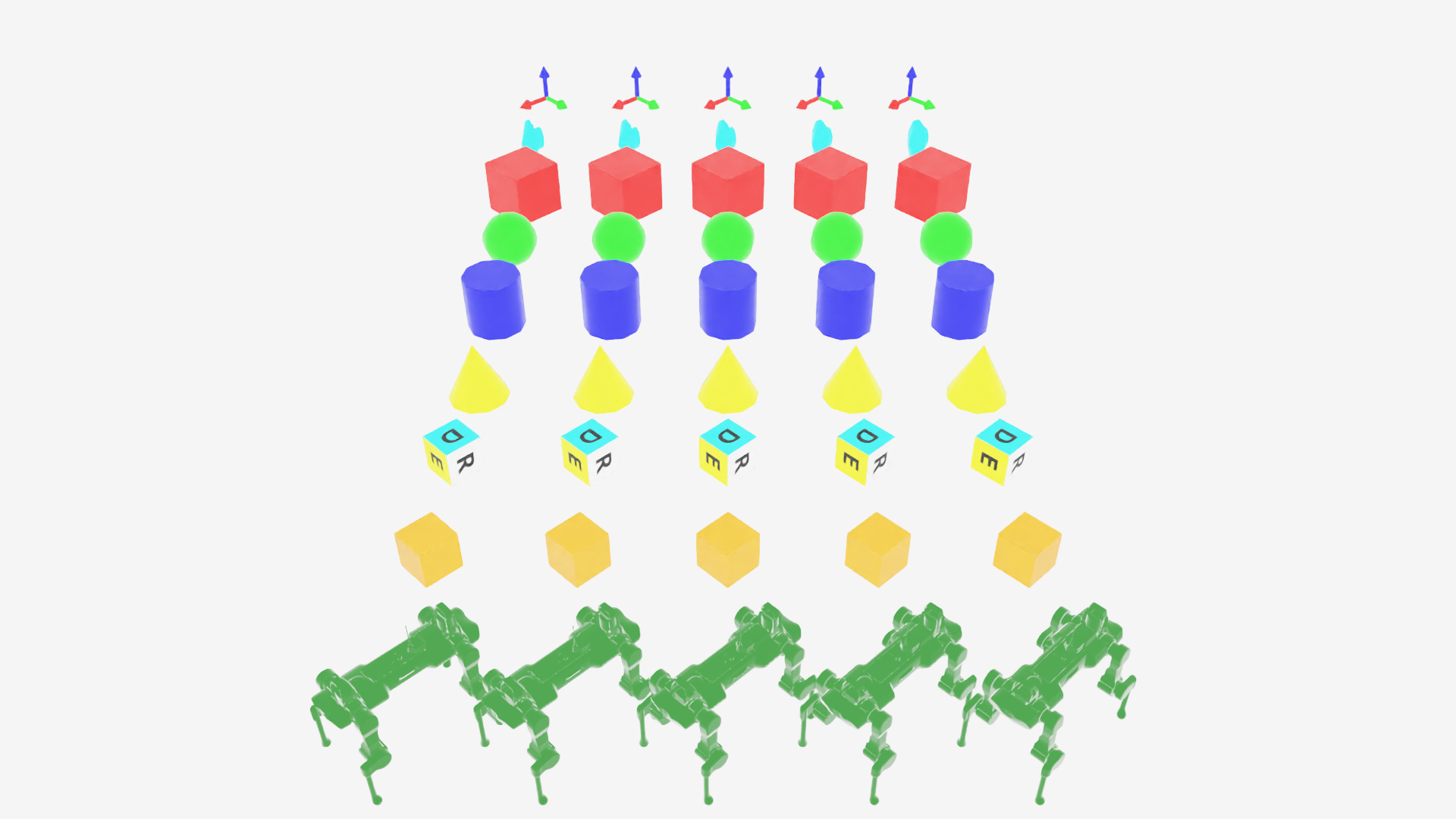
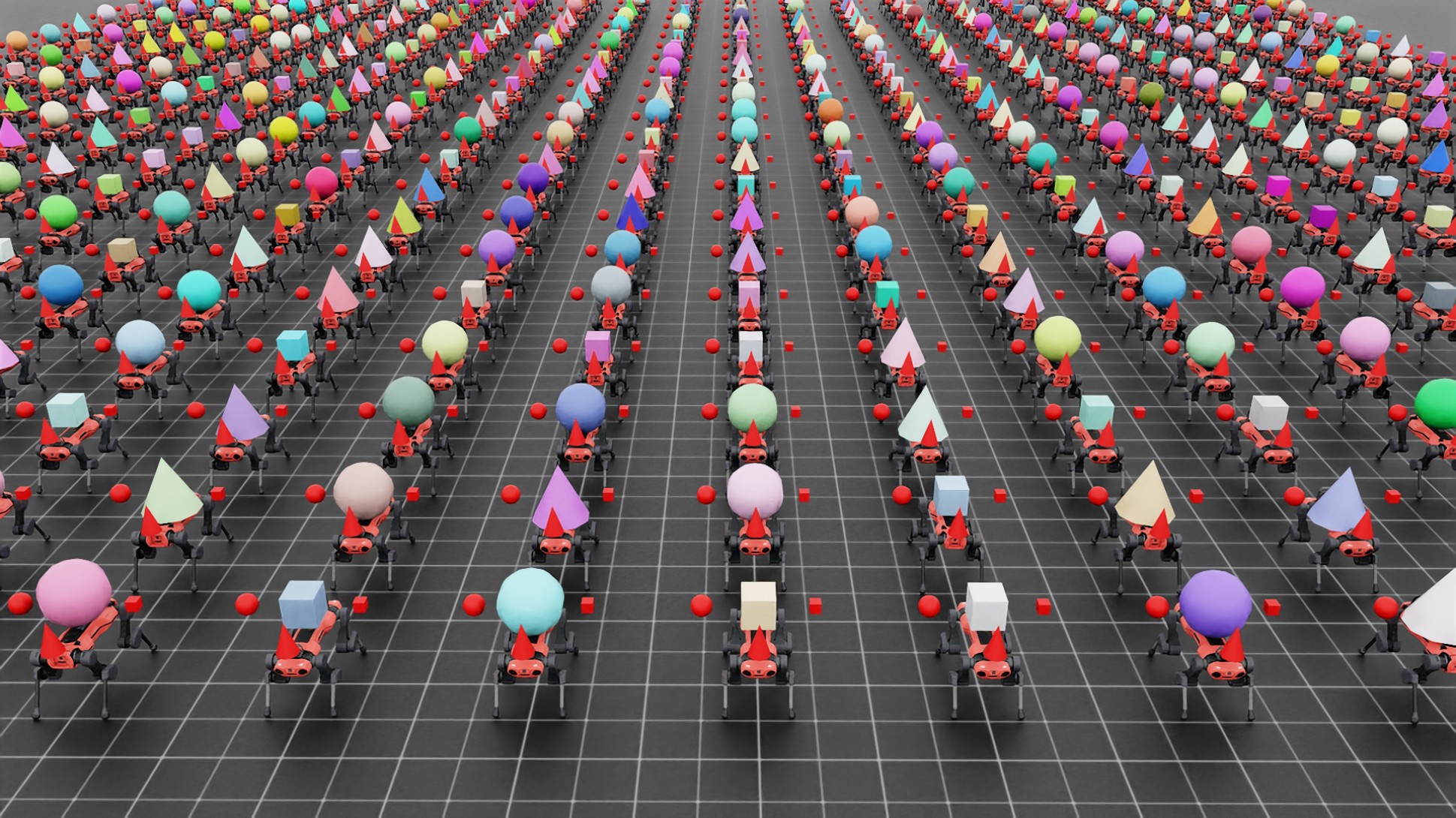
Use the interactive scene and spawn varying assets in individual environments:
./isaaclab.sh -p scripts/demos/multi_asset.py
isaaclab.bat -p scripts\demos\multi_asset.py
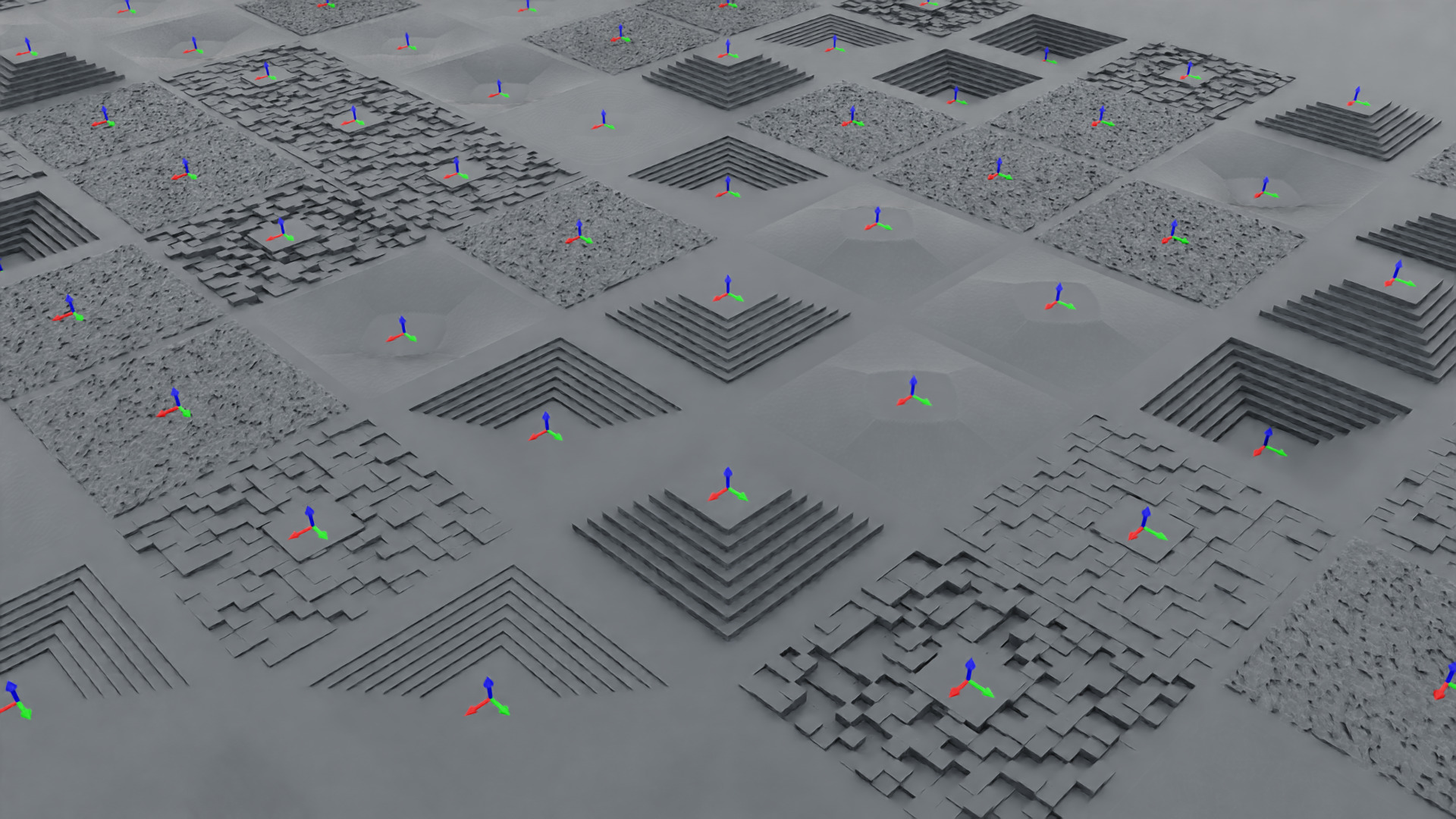
Create and spawn procedurally generated terrains with different configurations:
./isaaclab.sh -p scripts/demos/procedural_terrain.py
isaaclab.bat -p scripts\demos\procedural_terrain.py
Define multiple markers that are useful for visualizations:
./isaaclab.sh -p scripts/demos/markers.py
isaaclab.bat -p scripts\demos\markers.py