Using Visualizer Tiled Cameras#
For general visualizer documentation, see Visualization.
The visualizer tiled camera view is a live monitoring and debugging tool. It opens a non-interactive panel in the Kit or Newton visualizer and displays tiled camera views across all selected environments. They can stream observation camera data or generate cameras that follow the robots.
This guide is accompanied by the run_tiled_camera_visualizer.py script in the
IsaacLab/scripts/tutorials/07_visualizers directory.
Running this script demonstrates two ways to use tiled cameras:
configured tiled cameras pointed at and following moving Anymal-D robots shown in the Kit visualizer
streaming from existing wrist-mounted robot cameras shown in the Newton visualizer
Note: Visualizer tiled cameras are currently supported only in the Kit and Newton visualizers. Either visualizer can be used to run either example.
Code for run_tiled_camera_visualizer.py
1# Copyright (c) 2022-2026, The Isaac Lab Project Developers (https://github.com/isaac-sim/IsaacLab/blob/main/CONTRIBUTORS.md).
2# All rights reserved.
3#
4# SPDX-License-Identifier: BSD-3-Clause
5
6"""
7This script demonstrates the visualizer tiled camera panel.
8
9.. code-block:: bash
10
11 # Kit visualizer tiled camera panel
12 ./isaaclab.sh -p scripts/tutorials/07_visualizers/run_tiled_camera_visualizer.py \
13 --enable_cameras --task Isaac-Velocity-Rough-Anymal-D-v0 --num_envs 256 --viz kit
14
15 # Newton visualizer tiled camera panel
16 ./isaaclab.sh -p scripts/tutorials/07_visualizers/run_tiled_camera_visualizer.py \
17 --task Isaac-Stack-Cube-Galbot-Left-Arm-Gripper-Visuomotor-v0 --num_envs 25 --viz newton
18
19"""
20
21from __future__ import annotations
22
23import argparse
24import contextlib
25import sys
26
27import gymnasium as gym
28import torch
29
30import isaaclab_tasks # noqa: F401
31
32with contextlib.suppress(ImportError):
33 import isaaclab_tasks_experimental # noqa: F401
34from isaaclab_tasks.utils import (
35 add_launcher_args,
36 launch_simulation,
37 resolve_task_config,
38 setup_preset_cli,
39)
40
41KIT_DEFAULT_TASK = "Isaac-Velocity-Rough-Anymal-D-v0"
42NEWTON_DEFAULT_TASK = "Isaac-Stack-Cube-Galbot-Left-Arm-Gripper-Visuomotor-v0"
43SUPPORTED_TILED_VISUALIZERS = {"kit", "newton"}
44UNSUPPORTED_TILED_VISUALIZERS = {"rerun", "viser"}
45
46
47def _resolve_env_regex_path(prim_path: str) -> str:
48 """Resolve scene config env namespace macros to the cloned-env regex."""
49 return prim_path.format(ENV_REGEX_NS="/World/envs/env_.*")
50
51
52def _requested_visualizers(args_cli: argparse.Namespace) -> list[str]:
53 """Return requested visualizers, defaulting to Kit for this tutorial."""
54 visualizers = args_cli.visualizer or ["kit"]
55 visualizers = [str(visualizer).lower() for visualizer in visualizers]
56
57 if "none" in visualizers:
58 raise ValueError("This demo requires a tiled-camera visualizer. Use '--viz kit' or '--viz newton'.")
59 unsupported = sorted(set(visualizers) & UNSUPPORTED_TILED_VISUALIZERS)
60 if unsupported:
61 raise ValueError(
62 "The visualizer tiled camera panel is only implemented for Kit and Newton. "
63 f"Unsupported selection: {unsupported}."
64 )
65 unknown = sorted(set(visualizers) - SUPPORTED_TILED_VISUALIZERS)
66 if unknown:
67 raise ValueError(f"Unknown visualizer selection for this demo: {unknown}.")
68 return visualizers
69
70
71def _make_kit_visualizer_cfg(env_cfg):
72 """Create the Kit tiled-camera visualizer for the selected task."""
73 from isaaclab_visualizers.kit import KitVisualizerCfg
74
75 visualizer_cfg = KitVisualizerCfg()
76 visualizer_cfg.tiled_cam_view = True
77 visualizer_cfg.tiled_cam_num = 36
78
79 ego_cam_cfg = getattr(env_cfg.scene, "ego_cam", None)
80 if ego_cam_cfg is not None:
81 visualizer_cfg.tiled_cam_prim_path = _resolve_env_regex_path(ego_cam_cfg.prim_path)
82 visualizer_cfg.tiled_cam_eye = None
83 visualizer_cfg.tiled_cam_target_prim_path = None
84 return visualizer_cfg
85
86 visualizer_cfg.tiled_cam_prim_path = None
87 # Here is an alternative eye position for a top down view
88 # visualizer_cfg.tiled_cam_eye = (0.0, 0.0, 5.0)
89 visualizer_cfg.tiled_cam_eye = (3.0, 3.0, 3.0)
90 visualizer_cfg.tiled_cam_target_prim_path = "/World/envs/*/Robot/base"
91 return visualizer_cfg
92
93
94def _make_newton_visualizer_cfg(env_cfg):
95 """Create the Newton tiled-camera visualizer for the selected task."""
96 from isaaclab_visualizers.newton import NewtonVisualizerCfg
97
98 visualizer_cfg = NewtonVisualizerCfg()
99 visualizer_cfg.tiled_cam_view = True
100 visualizer_cfg.tiled_cam_num = 12
101
102 ego_cam_cfg = getattr(env_cfg.scene, "ego_cam", None)
103 if ego_cam_cfg is not None:
104 visualizer_cfg.tiled_cam_prim_path = _resolve_env_regex_path(ego_cam_cfg.prim_path)
105 visualizer_cfg.tiled_cam_eye = None
106 visualizer_cfg.tiled_cam_target_prim_path = None
107 return visualizer_cfg
108
109 # Here are other robot mounted camera options for this environment
110 # visualizer_cfg.tiled_cam_prim_path = "/World/envs/env_.*/Robot/left_arm_camera_sim_view_frame/left_camera"
111 # visualizer_cfg.tiled_cam_prim_path = "/World/envs/env_.*/Robot/right_arm_camera_sim_view_frame/right_camera"
112 visualizer_cfg.tiled_cam_prim_path = None
113 visualizer_cfg.tiled_cam_eye = (3.0, 3.0, 3.0)
114 visualizer_cfg.tiled_cam_target_prim_path = "/World/envs/*/Robot/base"
115 return visualizer_cfg
116
117
118def _configure_visualizers(env_cfg, args_cli: argparse.Namespace) -> None:
119 """Attach tiled camera visualizer configs to the environment simulation config."""
120 visualizers = _requested_visualizers(args_cli)
121 args_cli.visualizer = visualizers
122 env_cfg.sim.visualizer_cfgs = [
123 _make_kit_visualizer_cfg(env_cfg) if visualizer == "kit" else _make_newton_visualizer_cfg(env_cfg)
124 for visualizer in visualizers
125 ]
126
127
128def _resolve_task(args_cli: argparse.Namespace) -> str:
129 """Resolve the task for the selected visualizer."""
130 if args_cli.task is not None:
131 return args_cli.task
132 if "newton" in _requested_visualizers(args_cli):
133 return NEWTON_DEFAULT_TASK
134 return KIT_DEFAULT_TASK
135
136
137# add argparse arguments
138parser = argparse.ArgumentParser(description="Showcase the Kit/Newton visualizer tiled camera panel.")
139parser.add_argument("--num_envs", type=int, default=None, help="Number of environments to simulate.")
140parser.add_argument("--task", type=str, default=None, help="Name of the task.")
141# append AppLauncher cli args
142add_launcher_args(parser)
143args_cli, hydra_args = setup_preset_cli(parser)
144args_cli.task = _resolve_task(args_cli)
145sys.argv = [sys.argv[0]] + hydra_args
146
147
148def main():
149 """Run a random-action environment with a tiled camera visualizer."""
150 # parse configuration via Hydra (supports preset selection, e.g. presets=newton_mjwarp)
151 env_cfg, _ = resolve_task_config(args_cli.task, "")
152 _configure_visualizers(env_cfg, args_cli)
153
154 with launch_simulation(env_cfg, args_cli):
155 # override with CLI arguments
156 env_cfg.scene.num_envs = args_cli.num_envs if args_cli.num_envs is not None else env_cfg.scene.num_envs
157 env_cfg.sim.device = args_cli.device if args_cli.device is not None else env_cfg.sim.device
158
159 # create environment
160 env = gym.make(args_cli.task, cfg=env_cfg)
161
162 # print info (this is vectorized environment)
163 print(f"[INFO]: Gym observation space: {env.observation_space}")
164 print(f"[INFO]: Gym action space: {env.action_space}")
165 env.reset()
166
167 # keep stepping until all visualizer windows have been closed
168 sim = env.unwrapped.sim
169 if not sim.visualizers:
170 print("[WARN]: No visualizers found. Exiting.")
171 env.close()
172 return
173
174 while True:
175 if sim.visualizers and not any(v.is_running() and not v.is_closed for v in sim.visualizers):
176 break
177 with torch.inference_mode():
178 actions = 2 * torch.rand(env.action_space.shape, device=env.unwrapped.device) - 1
179 env.step(actions)
180
181 env.close()
182
183
184if __name__ == "__main__":
185 main()
Example One: Following Anymal-D Robots#
The Kit Visualizer shows the tiled camera view in a separate tab inside the main Viewport window. The highlighted tab area in the figures below shows where to toggle between the interactive viewport and the visualizer tiled camera view.

Kit visualizer showing the default interactive viewport.#

Kit visualizer showing the tiled camera view generated for selected Anymal-D robots.#
Note, you can also display the main visualizer camera and the tiled camera view side by side for dual monitoring.
To run the tutorial with the args for this example, use:
python scripts/tutorials/07_visualizers/run_tiled_camera_visualizer.py --enable_cameras --task Isaac-Velocity-Rough-Anymal-D-v0 --num_envs 256 --viz kit
Within the script, you’ll find the KitVisualizerCfg configuration used to
generate this example. You can use this config as a template for your own use
cases.
In this example, a set of cameras is created to point toward each robot’s base
prim and follow its motion. The camera’s position, relative to the prim, is set
by the tiled_cam_eye field of KitVisualizerCfg. For this demo, the
camera is offset by (3.0, 3.0, 3.0) from each robot base. If you change tiled_cam_eye
(for example, to (0, 0, 5)), the panel will show a top-down view instead.
In this example, there are 256 total environments, and we randomly sample 36 to stream to the tiled camera view.
Also note that the Kit visualizer tiled camera view requires passing the
--enable_cameras CLI arg.
Example Two: Streaming from Robot-Mounted Cameras#
The Newton visualizer provides a tiled camera view in a lightweight OpenGL window.
Use the highlighted Tiled Camera View dropdown in the left-hand sidebar to
show or hide the tiled camera panel.
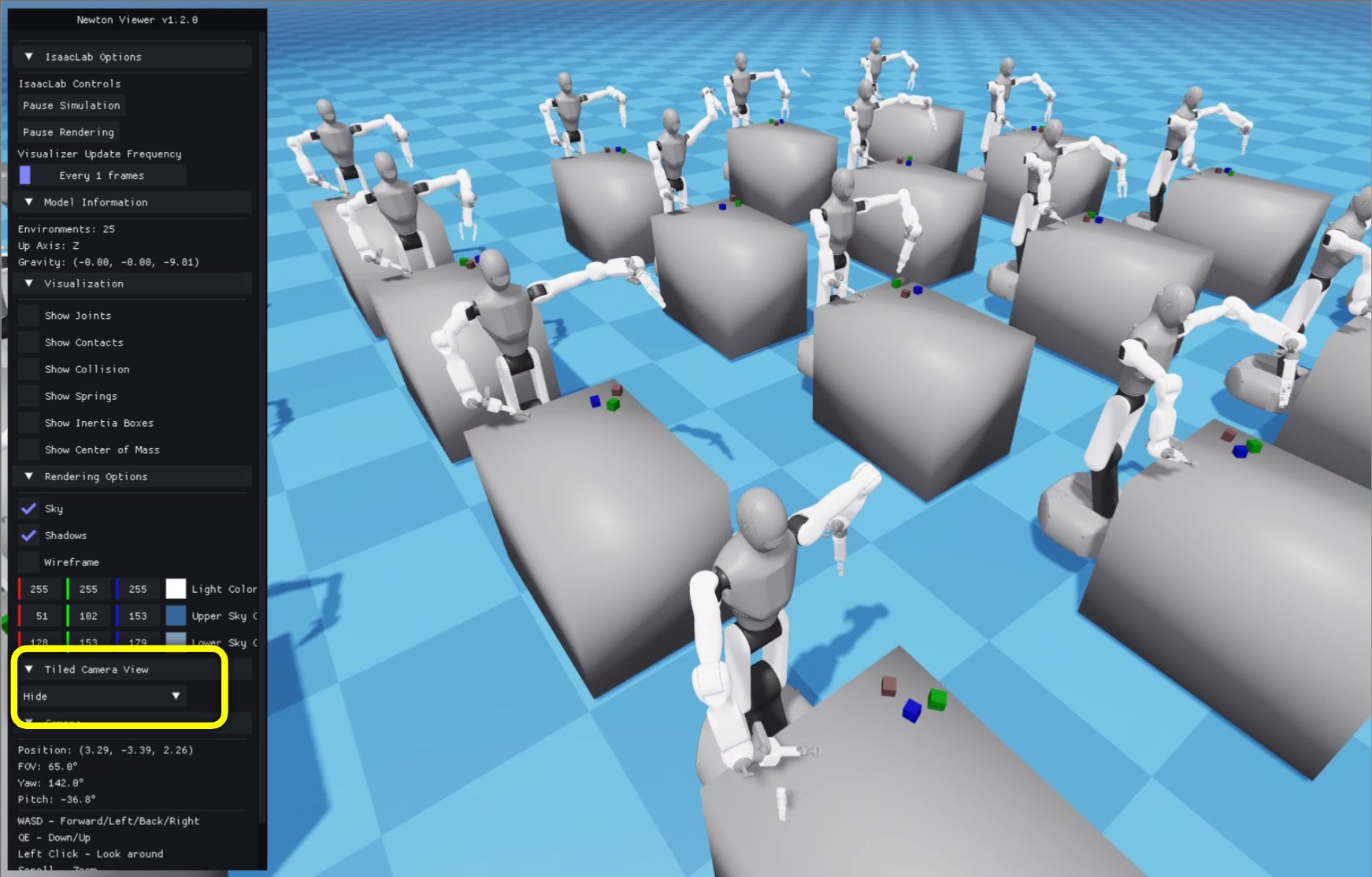
Newton visualizer showing the default interactive viewport.#
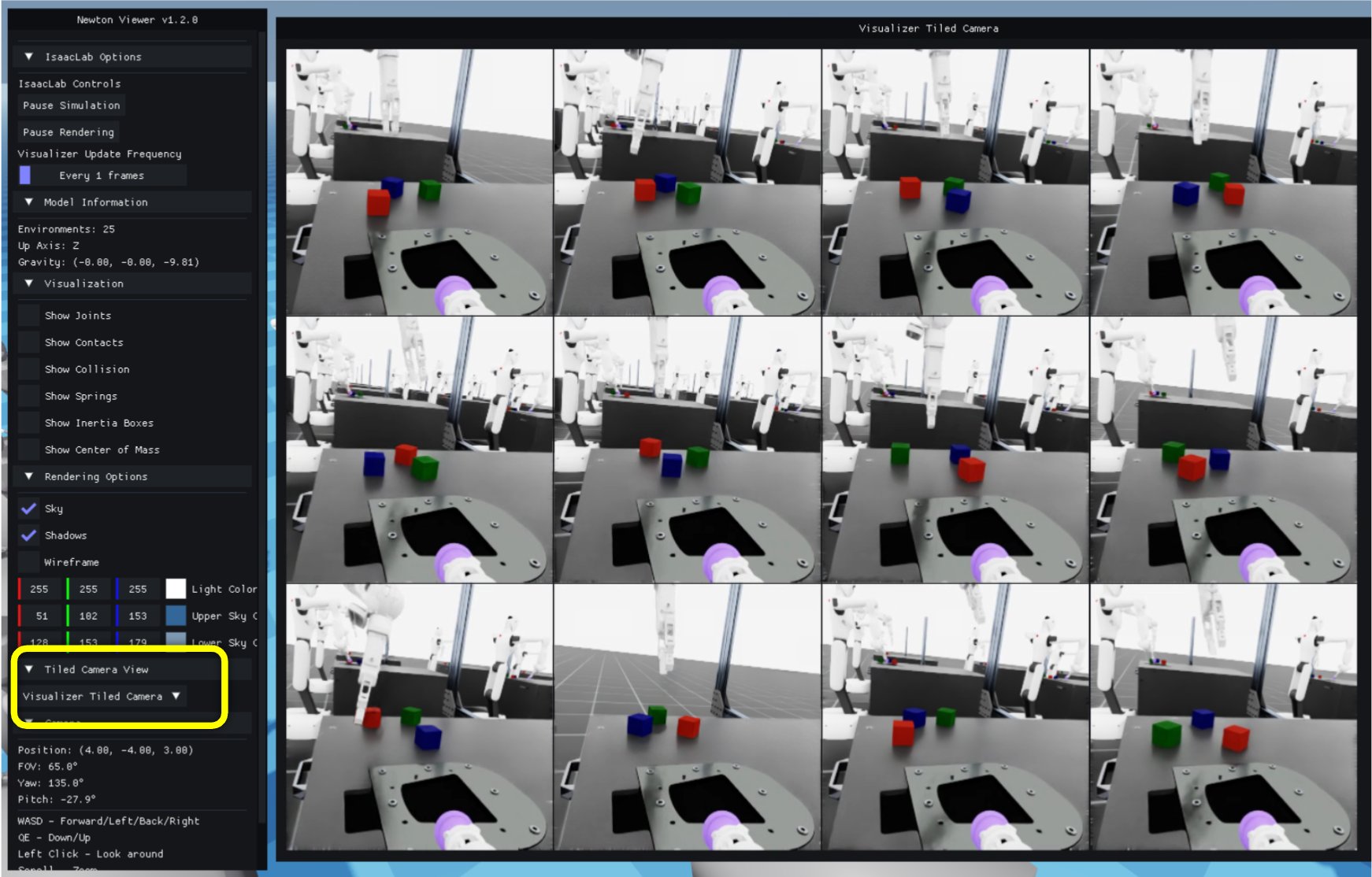
Newton visualizer showing the selected Galbot head-camera feeds in the tiled camera panel.#
In this example, we use the Galbot cube stacking environment, which comes with built-in wrist-mounted cameras. This setup provides an egocentric view of the gripper, table, and cubes in each selected environment.
To launch this example, run:
python scripts/tutorials/07_visualizers/run_tiled_camera_visualizer.py --task Isaac-Stack-Cube-Galbot-Left-Arm-Gripper-Visuomotor-v0 --num_envs 25 --viz newton
Within the script, the NewtonVisualizerCfg is configured to stream images from the
existing camera sensor located at
/World/envs/env_.*/Robot/head_camera_sim_view_frame/head_camera. This path
points to the head camera, but you can edit the tiled_cam_prim_path
field of NewtonVisualizerCfg in the script to show a different existing camera if
needed.
In this demo, 25 environments are simulated, and 12 camera feeds are shown in the tiled panel by default.
Configuration notes#
To customize tiled camera behavior, edit the highlighted VisualizerCfg fields in
run_tiled_camera_visualizer.py:
For generated cameras,
tiled_cam_target_prim_pathchooses the followed prim andtiled_cam_eyesets the camera offset from that prim.For existing scene cameras,
tiled_cam_prim_pathmust match an Isaac LabCamerasensor in the selected task.tiled_cam_numcontrols how many environment tiles are shown.
Troubleshooting#
If a generated view fails with a missing prim error, check that
tiled_cam_target_prim_pathresolves in each selected environment. Common template forms include/World/envs/*/...and/World/envs/env_.*/....If an existing-camera view reports that no Isaac Lab camera owns the prim, check that
tiled_cam_prim_pathmatches aCamerasensor in the task.If
rerunorviseris selected, use--viz kitor--viz newtoninstead. The tiled camera panel is currently implemented for Kit and Newton.If the view is too expensive, reduce
tiled_cam_num,--num_envs, or the camera resolution. The visualizer caps the tiled panel at 100 tiles.
See also#
Visualization - visualizer configuration and UI controls.
Configuring RTX Rendering Settings - selecting rendering presets and quality modes.