Available Environments#
The following lists comprises of all the RL tasks implementations that are available in Isaac Lab. While we try to keep this list up-to-date, you can always get the latest list of environments by running the following command:
./isaaclab.sh -p source/standalone/environments/list_envs.py
isaaclab.bat -p source\standalone\environments\list_envs.py
We are actively working on adding more environments to the list. If you have any environments that you would like to add to Isaac Lab, please feel free to open a pull request!
Single-agent#
Classic#
Classic environments that are based on IsaacGymEnvs implementation of MuJoCo-style environments.
World |
Environment ID |
Description |
|---|---|---|
|
Move towards a direction with the MuJoCo humanoid robot |
|
|
Move towards a direction with the MuJoCo ant robot |
|
|
Move the cart to keep the pole upwards in the classic cartpole control |
|
|
Move the cart to keep the pole upwards in the classic cartpole control and perceptive inputs |
Manipulation#
Environments based on fixed-arm manipulation tasks.
For many of these tasks, we include configurations with different arm action spaces. For example, for the reach environment:
Isaac-Lift-Cube-Franka-v0: Franka arm with joint position control
Isaac-Lift-Cube-Franka-IK-Abs-v0: Franka arm with absolute IK control
Isaac-Lift-Cube-Franka-IK-Rel-v0: Franka arm with relative IK control
World |
Environment ID |
Description |
|---|---|---|
|
Move the end-effector to a sampled target pose with the Franka robot |
|
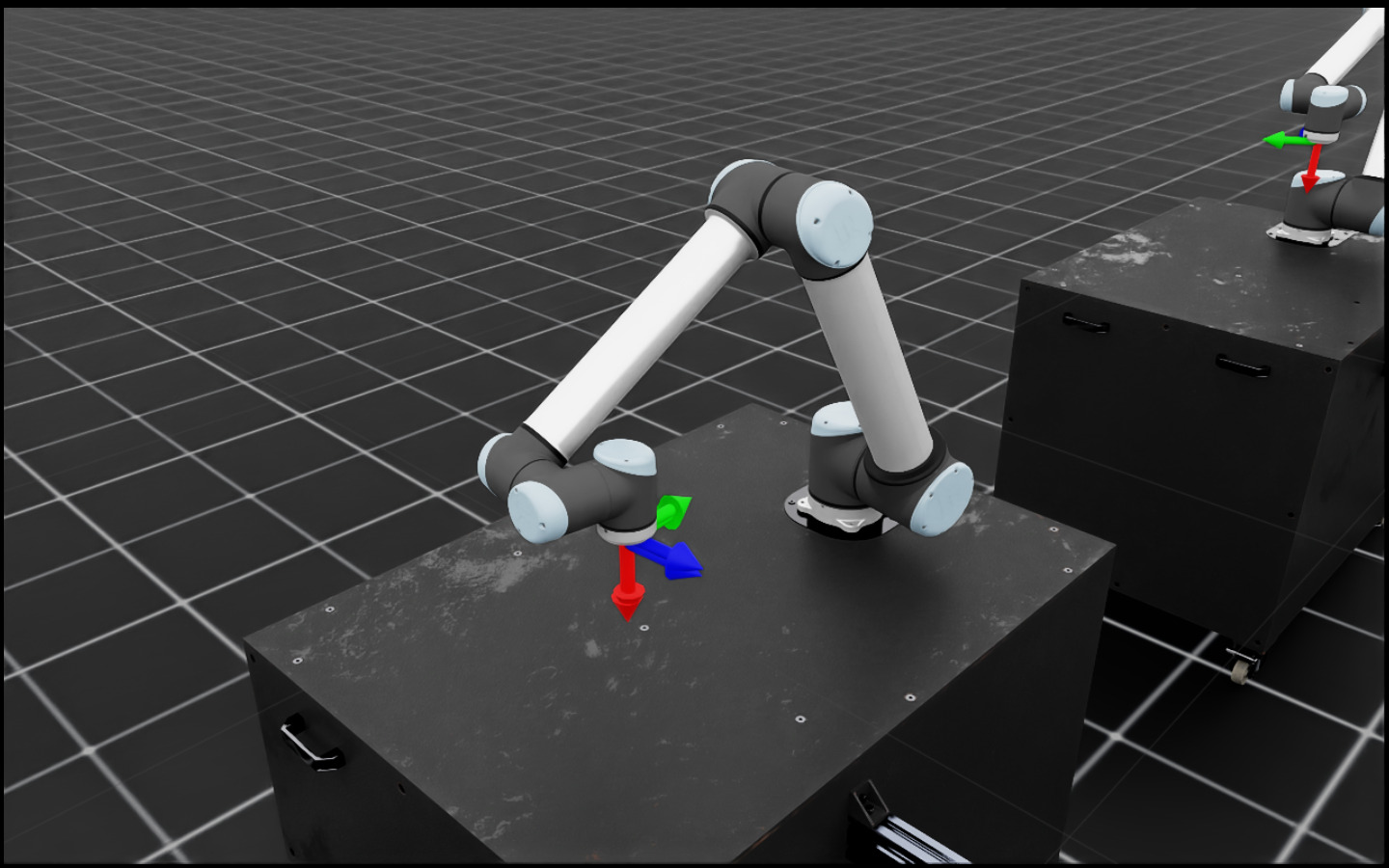
|
Move the end-effector to a sampled target pose with the UR10 robot |
|
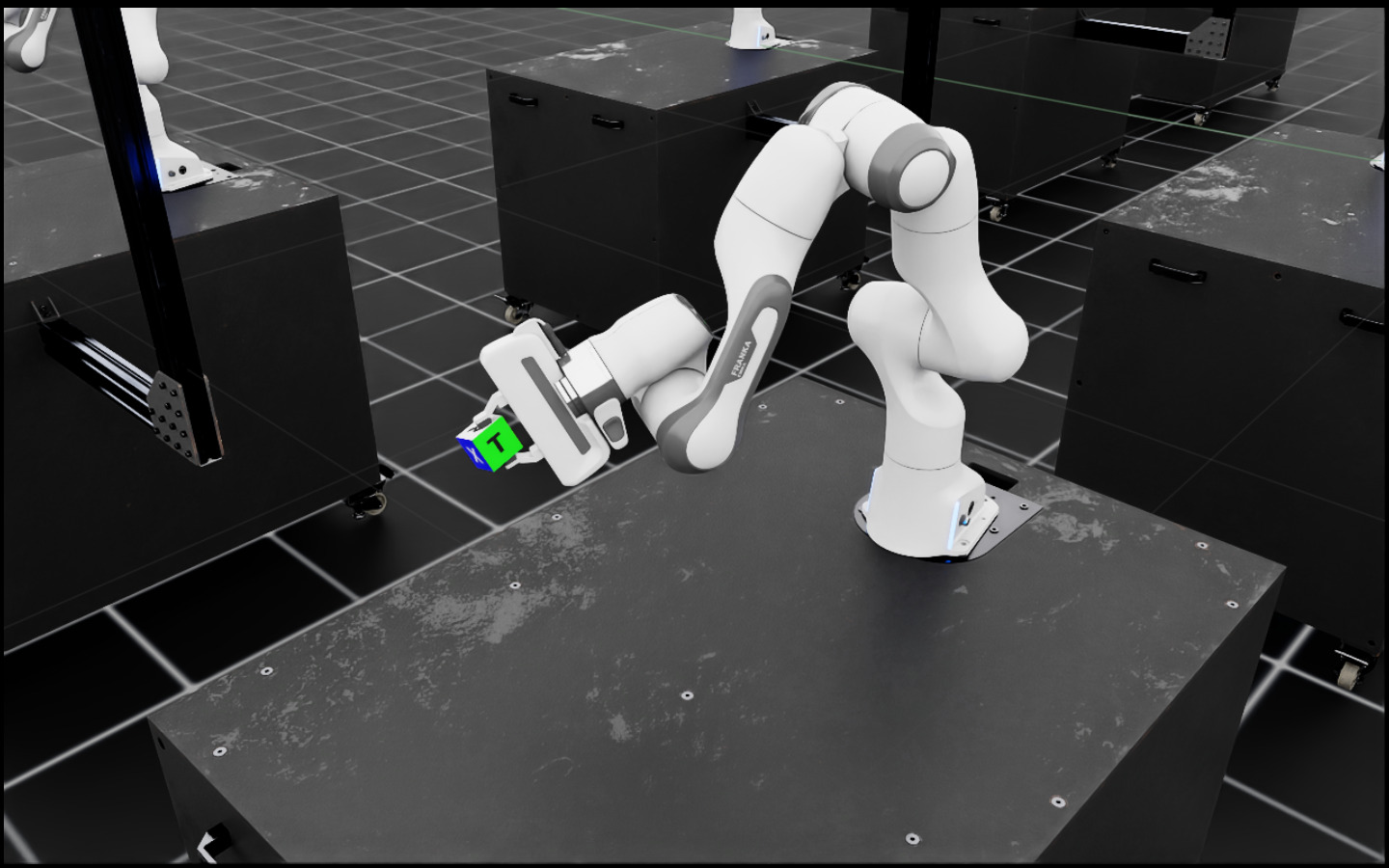
|
Pick a cube and bring it to a sampled target position with the Franka robot |
|
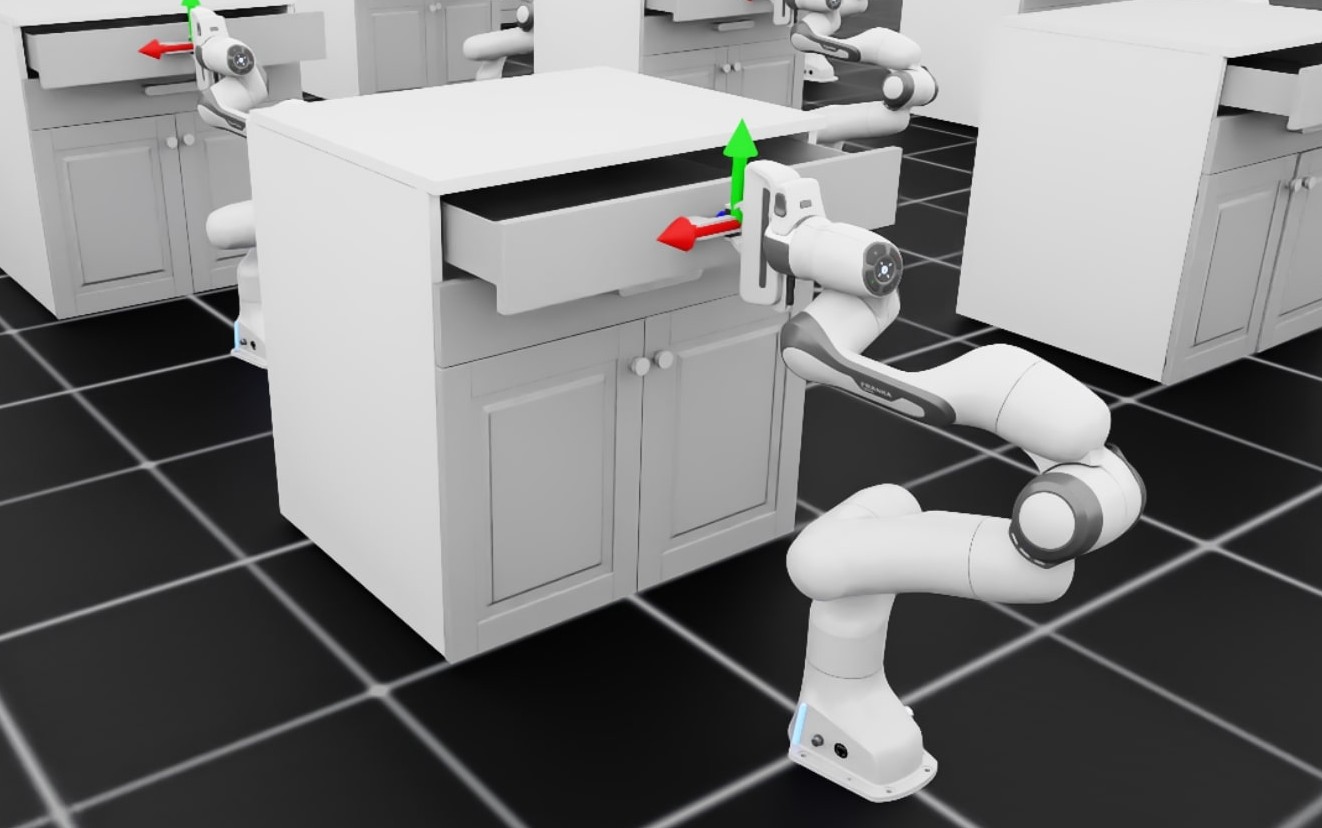
|
Grasp the handle of a cabinet’s drawer and open it with the Franka robot |
|
|
In-hand reorientation of a cube using Allegro hand |
|
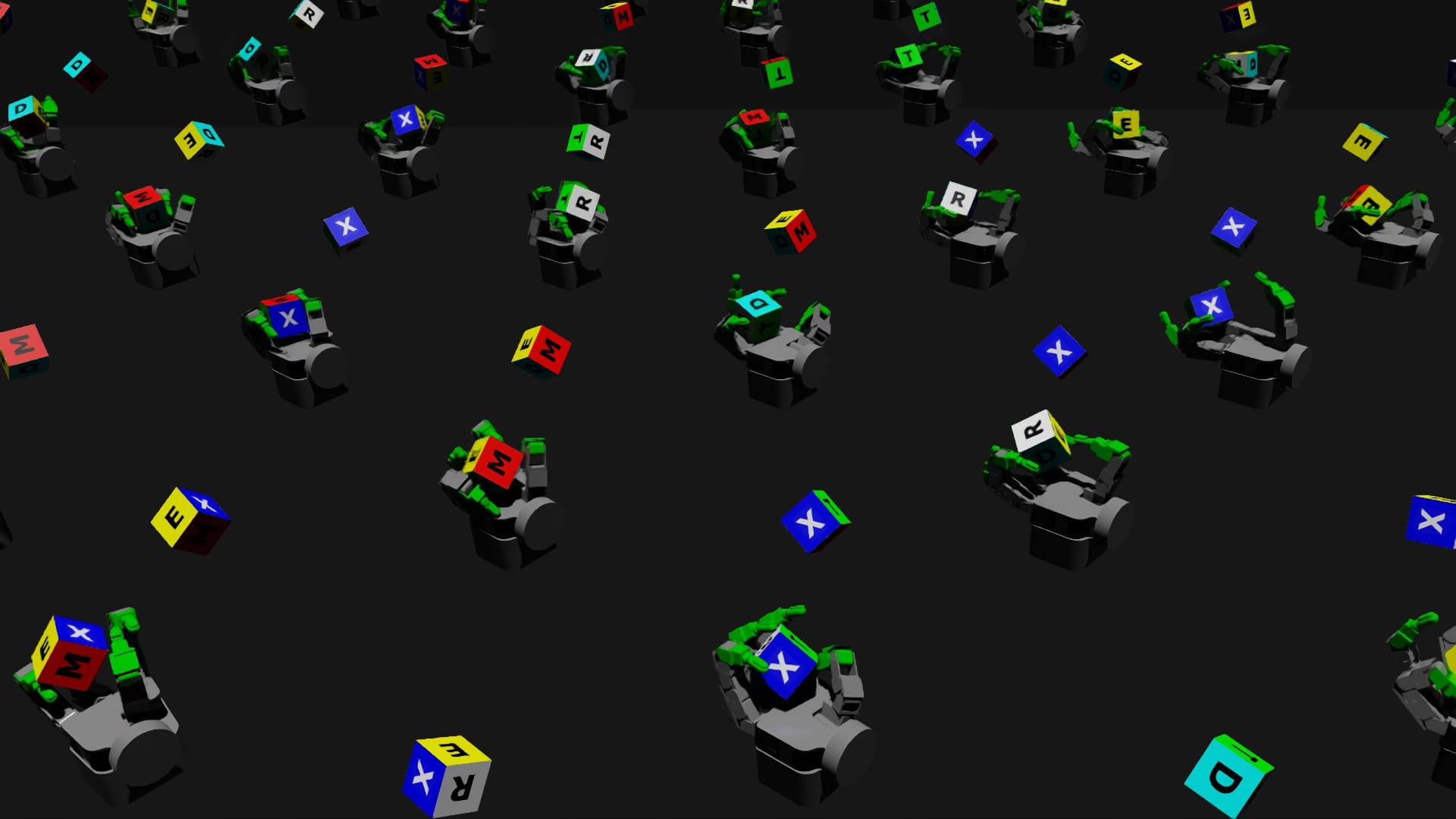
|
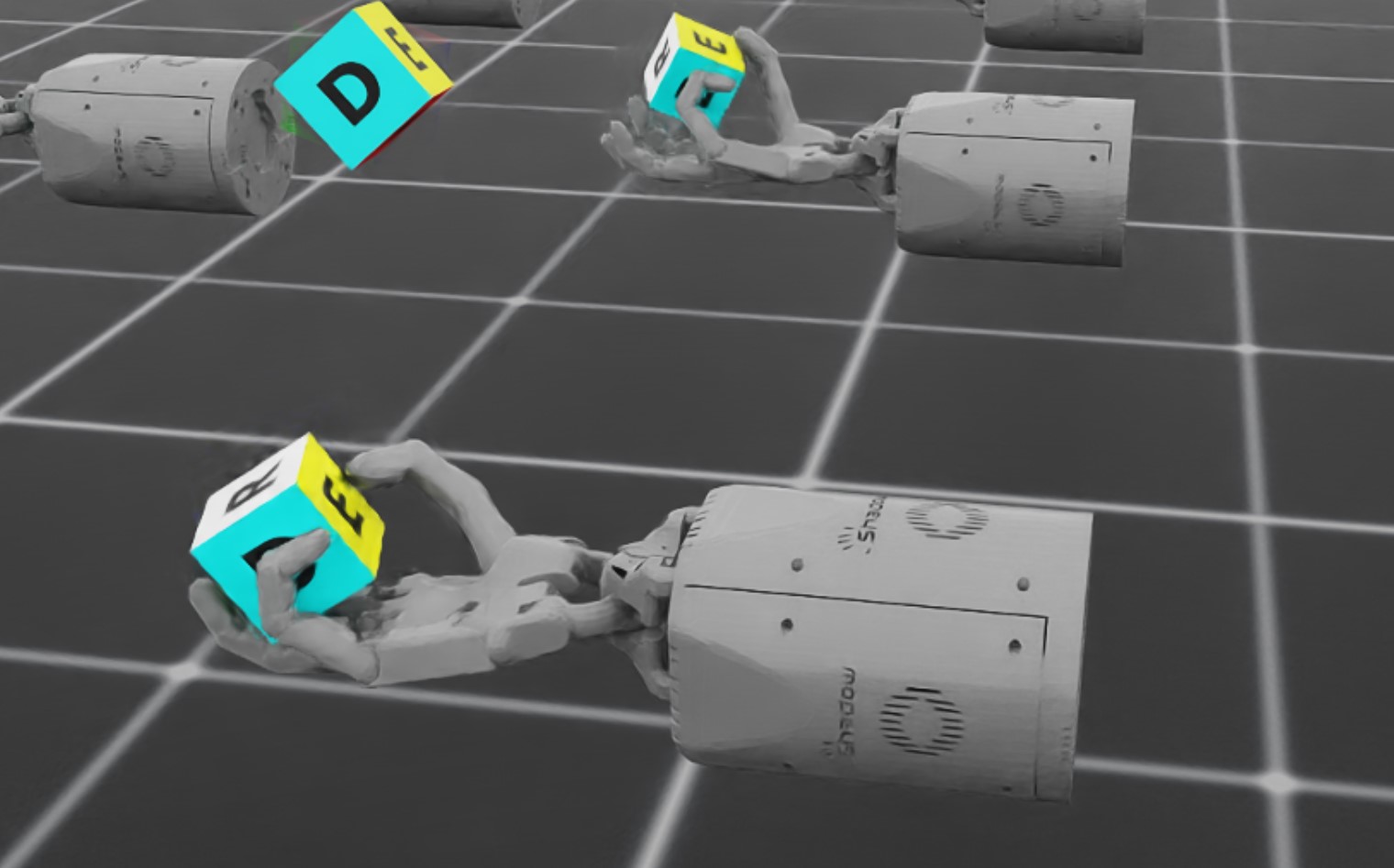
Isaac-Repose-Cube-Shadow-Direct-v0 |
In-hand reorientation of a cube using Shadow hand |
|
In-hand reorientation of a cube using Shadow hand using perceptive inputs |
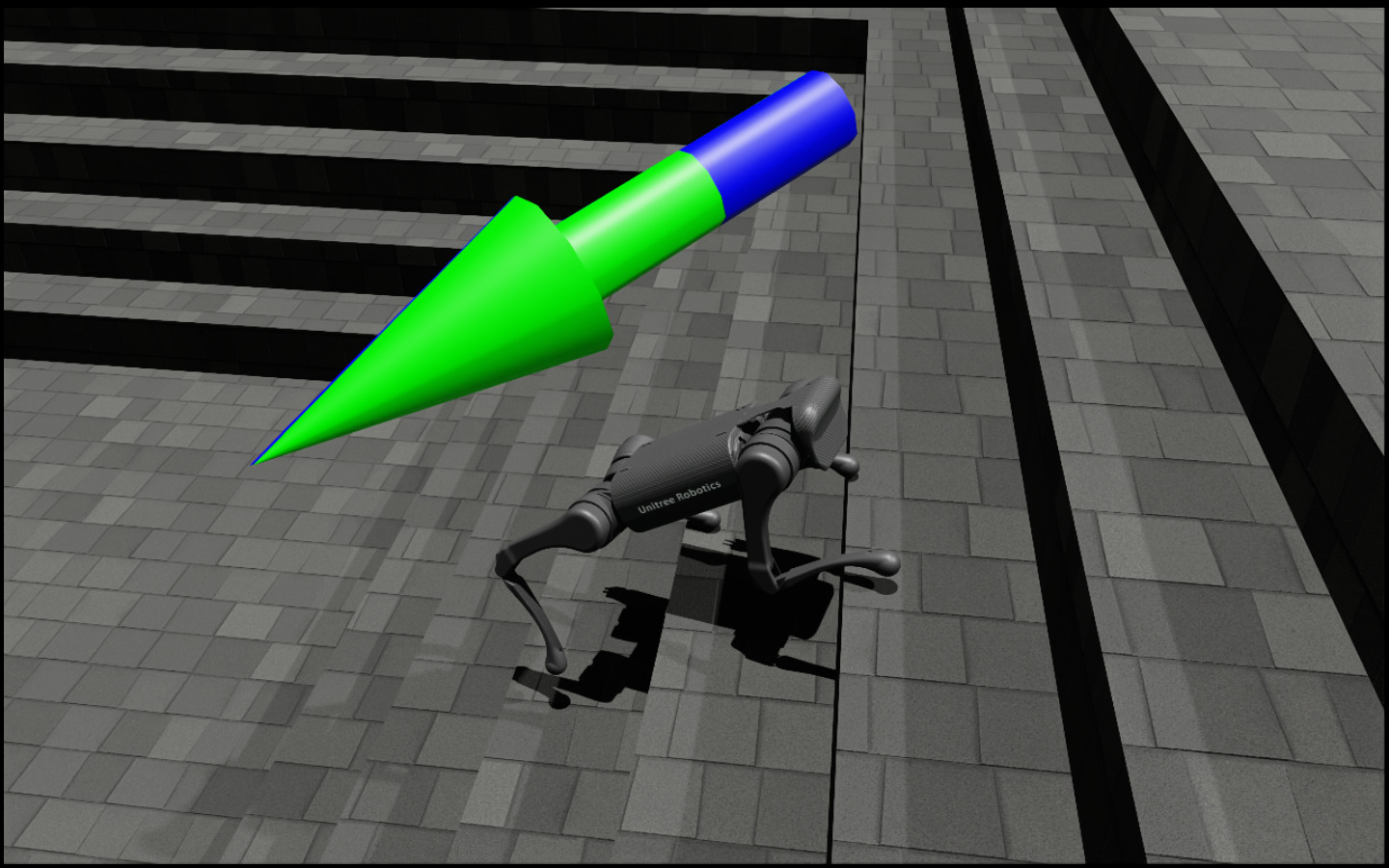
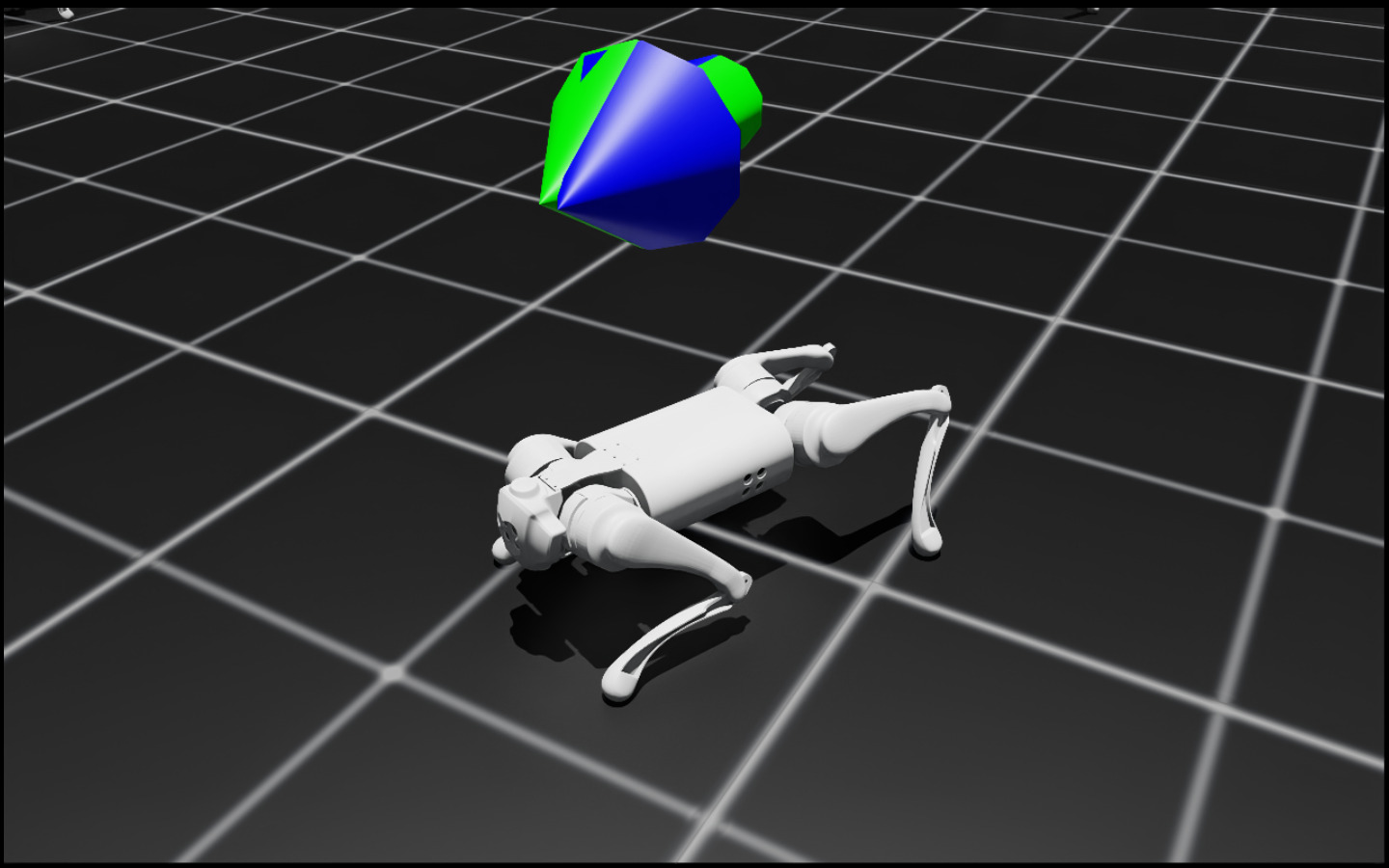
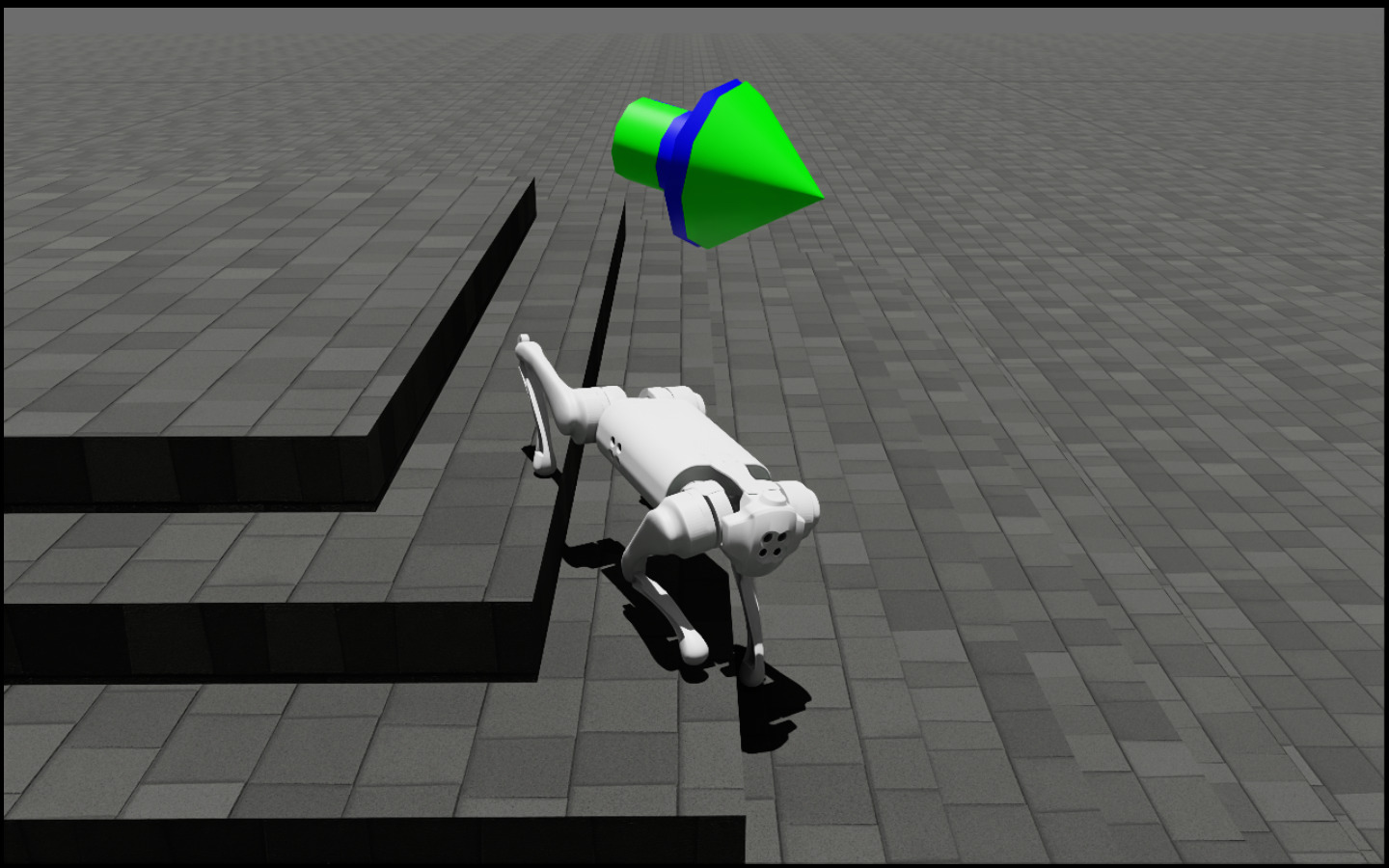
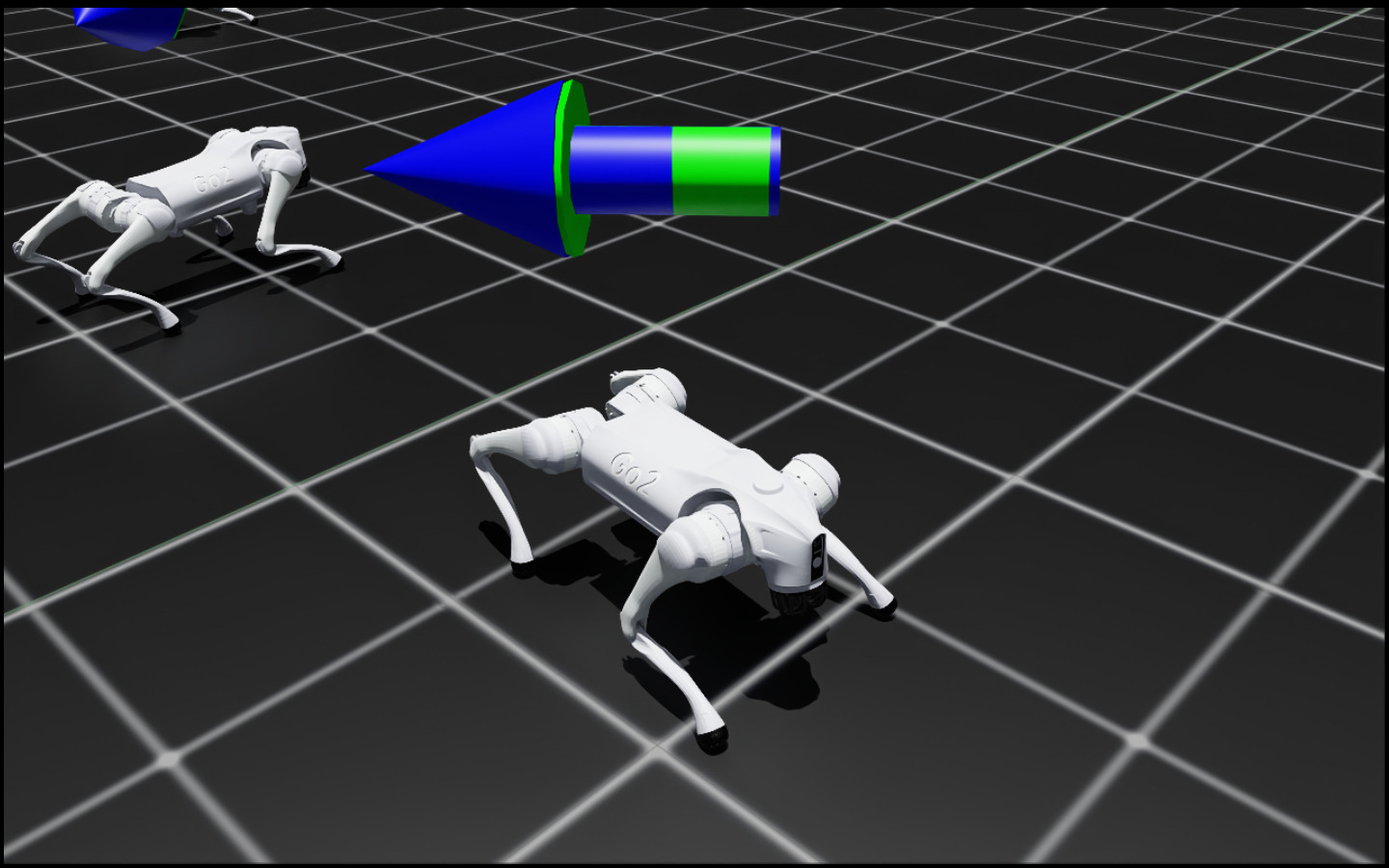
Locomotion#
Environments based on legged locomotion tasks.
World |
Environment ID |
Description |
|---|---|---|
|
Track a velocity command on flat terrain with the Anymal B robot |
|
|
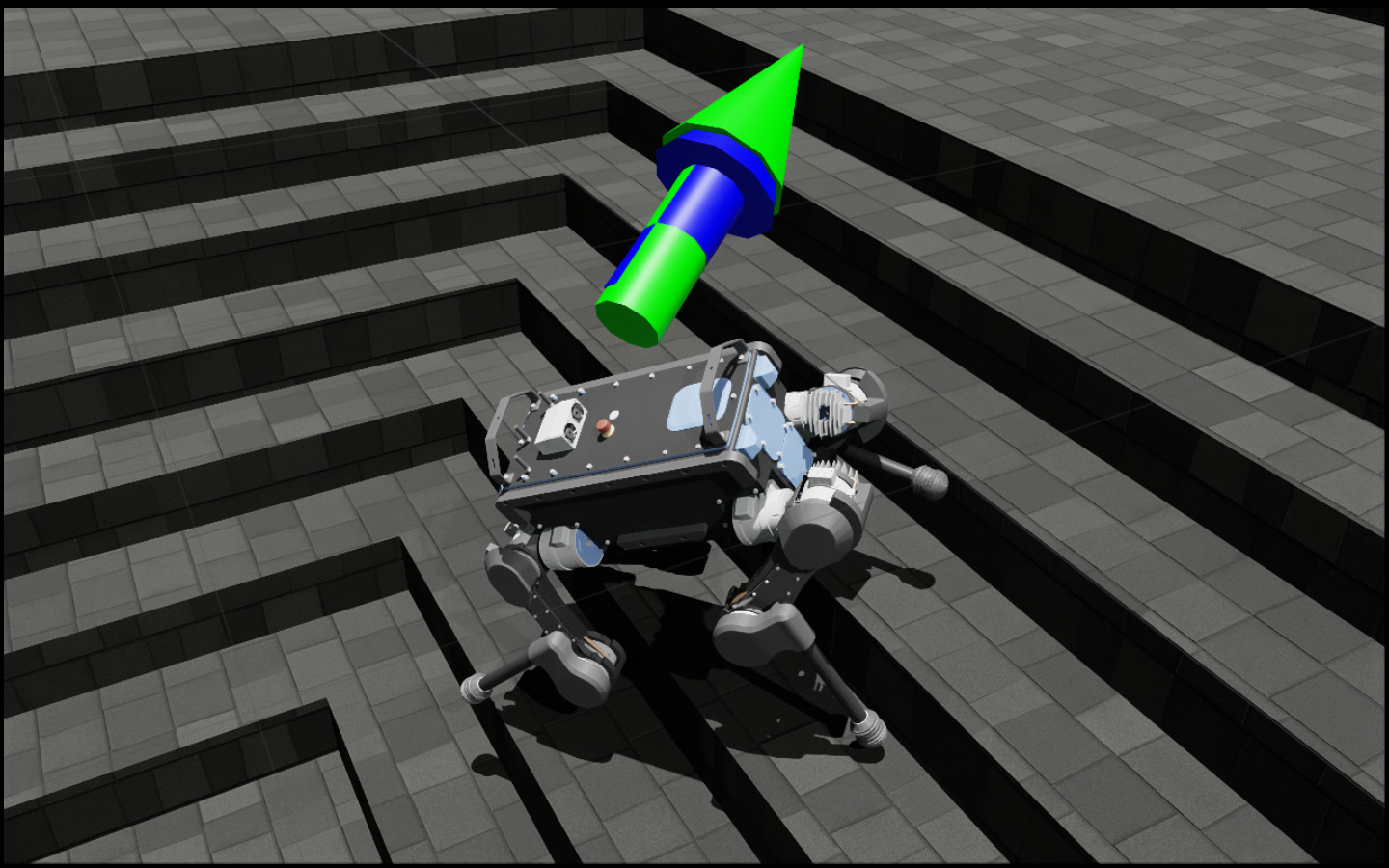
Track a velocity command on rough terrain with the Anymal B robot |
|
|
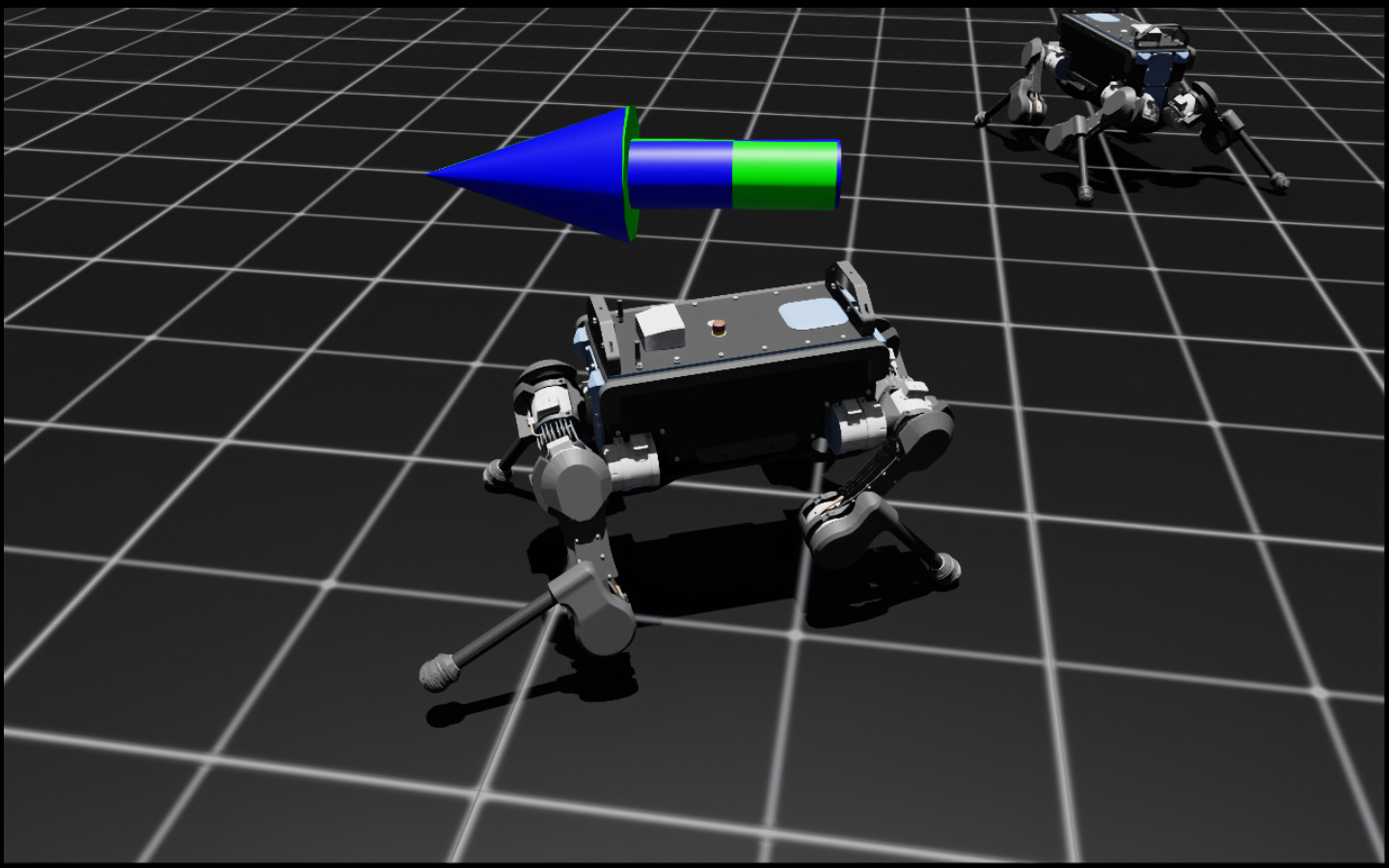
Track a velocity command on flat terrain with the Anymal C robot |
|
|
Track a velocity command on rough terrain with the Anymal C robot |
|
|
Track a velocity command on flat terrain with the Anymal D robot |
|
|
Track a velocity command on rough terrain with the Anymal D robot |
|
|
Track a velocity command on flat terrain with the Unitree A1 robot |
|
|
Track a velocity command on rough terrain with the Unitree A1 robot |
|
|
Track a velocity command on flat terrain with the Unitree Go1 robot |
|
|
Track a velocity command on rough terrain with the Unitree Go1 robot |
|
|
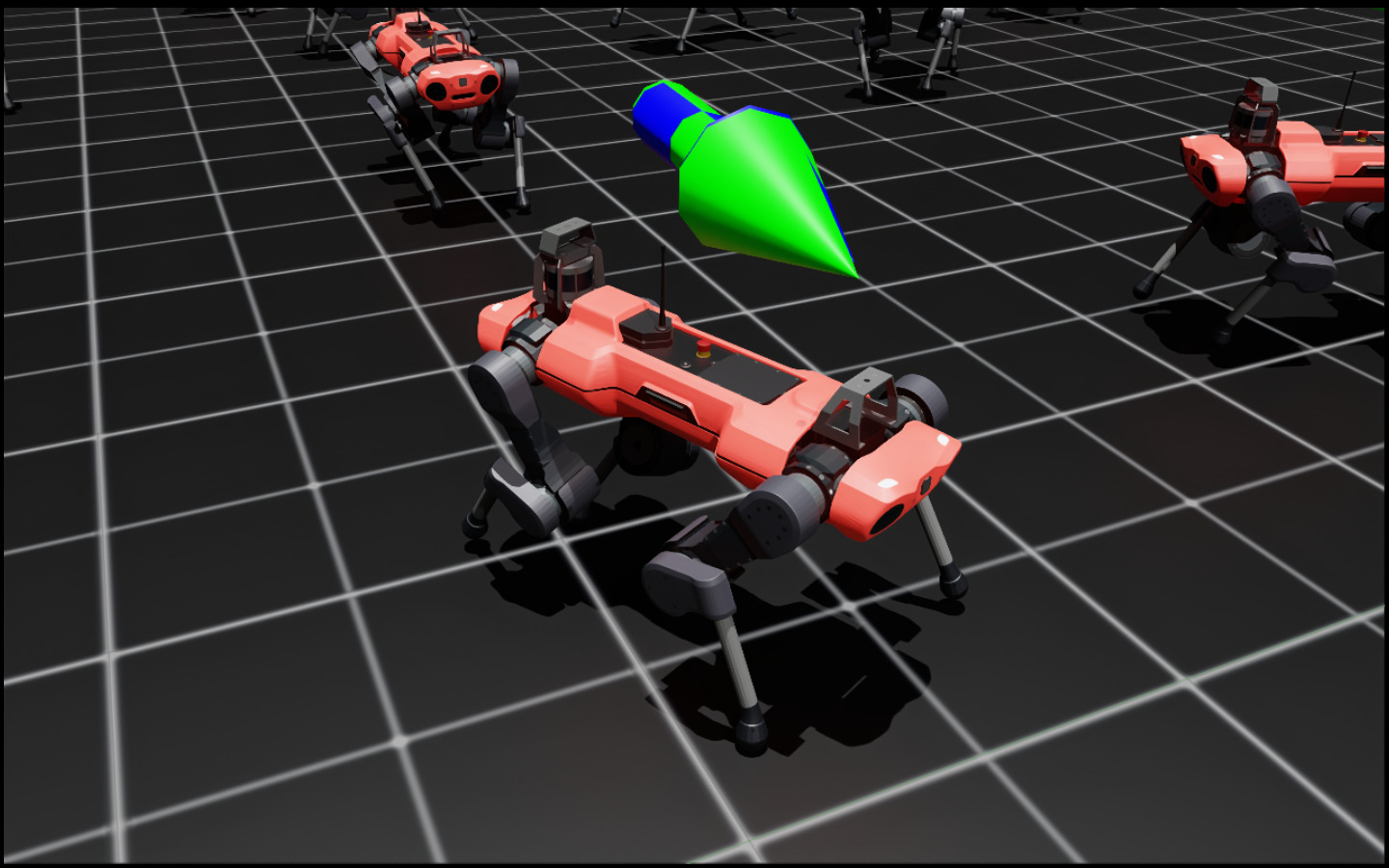
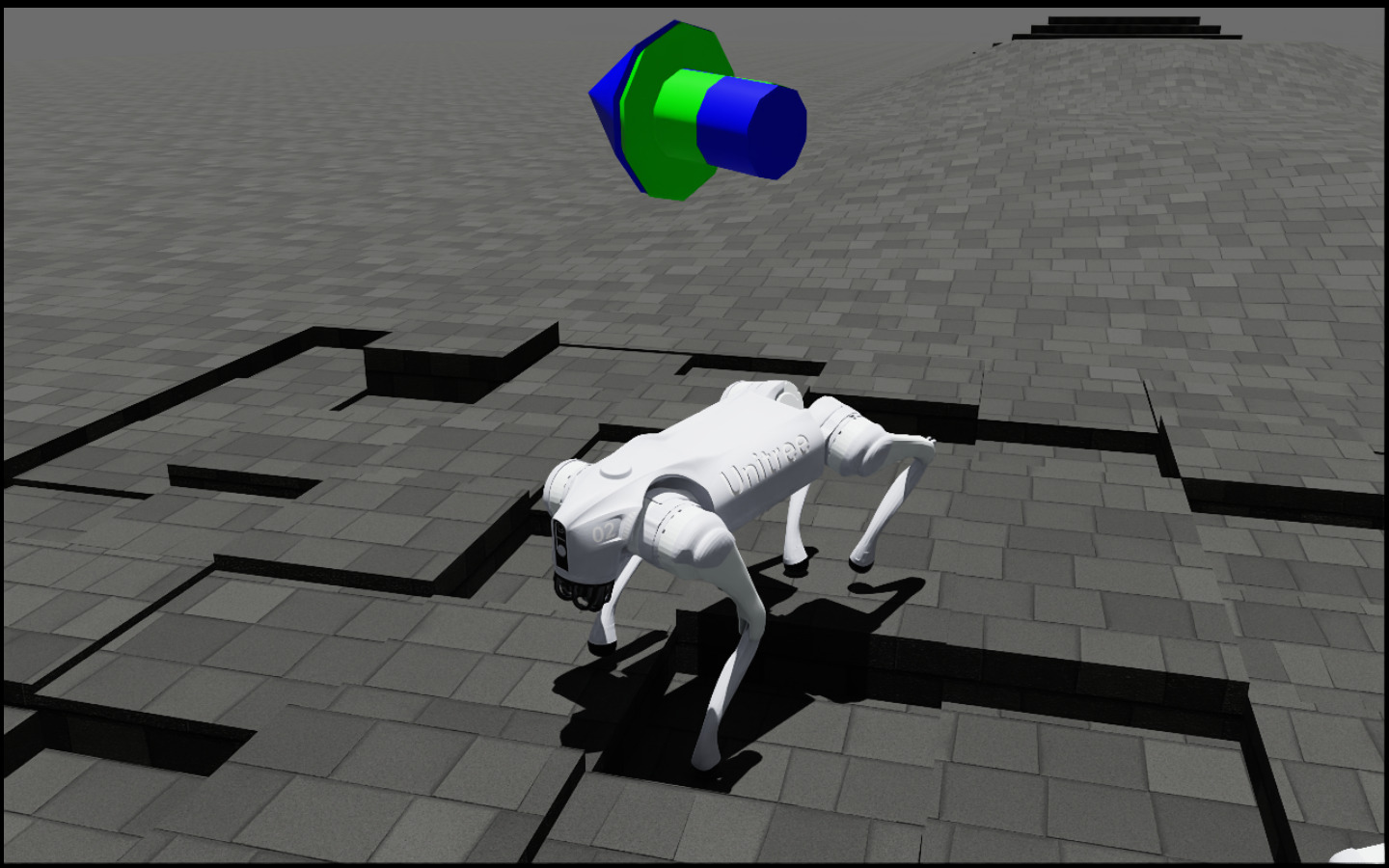
Track a velocity command on flat terrain with the Unitree Go2 robot |
|
|
Track a velocity command on rough terrain with the Unitree Go2 robot |
|
|
Track a velocity command on flat terrain with the Boston Dynamics Spot robot |
|
|
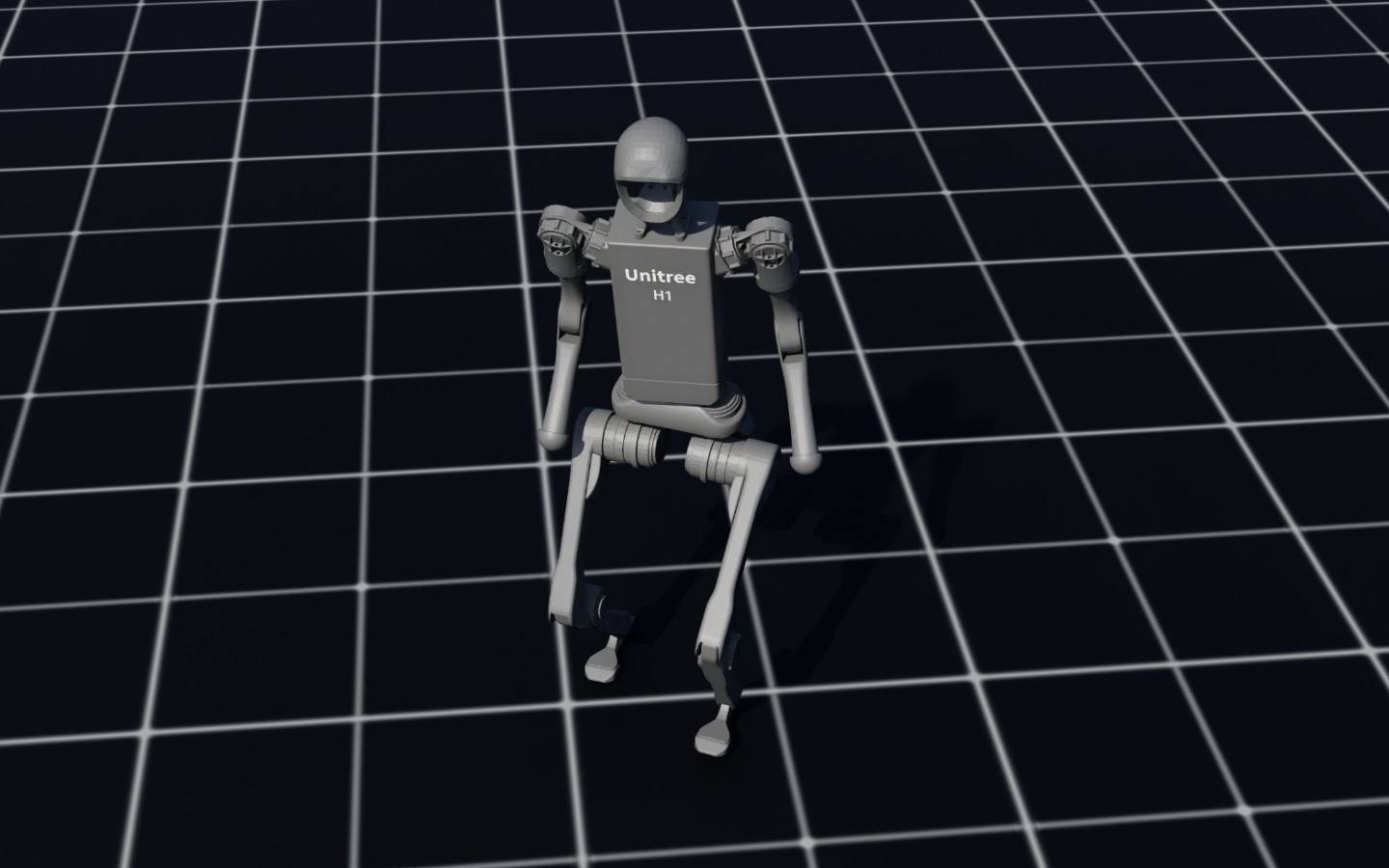
Track a velocity command on flat terrain with the Unitree H1 robot |
|
|
Track a velocity command on rough terrain with the Unitree H1 robot |
|
|
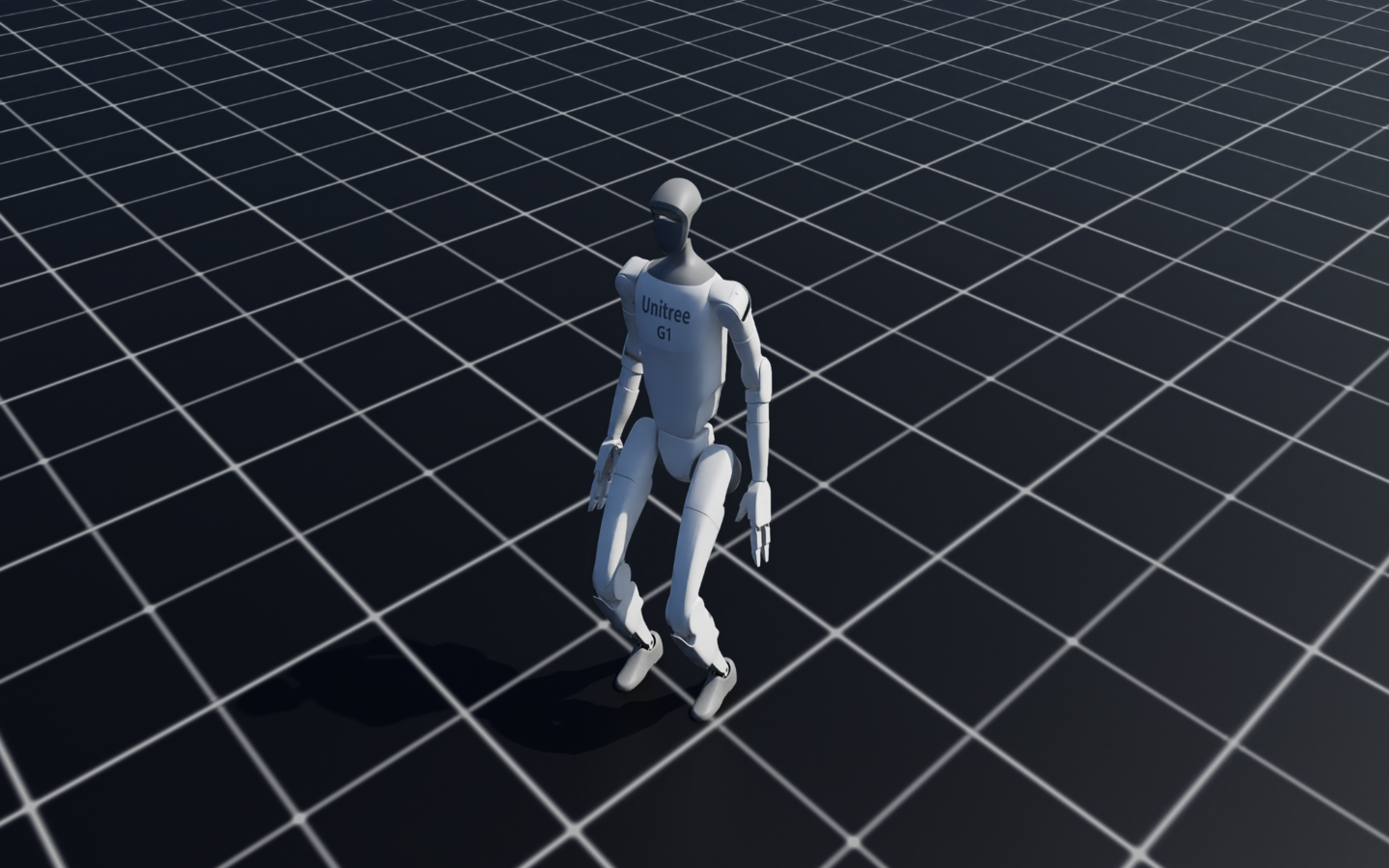
Track a velocity command on flat terrain with the Unitree G1 robot |
|
|
Track a velocity command on rough terrain with the Unitree G1 robot |



Navigation#
World |
Environment ID |
Description |
|---|---|---|
|
Navigate towards a target x-y position and heading with the ANYmal C robot. |
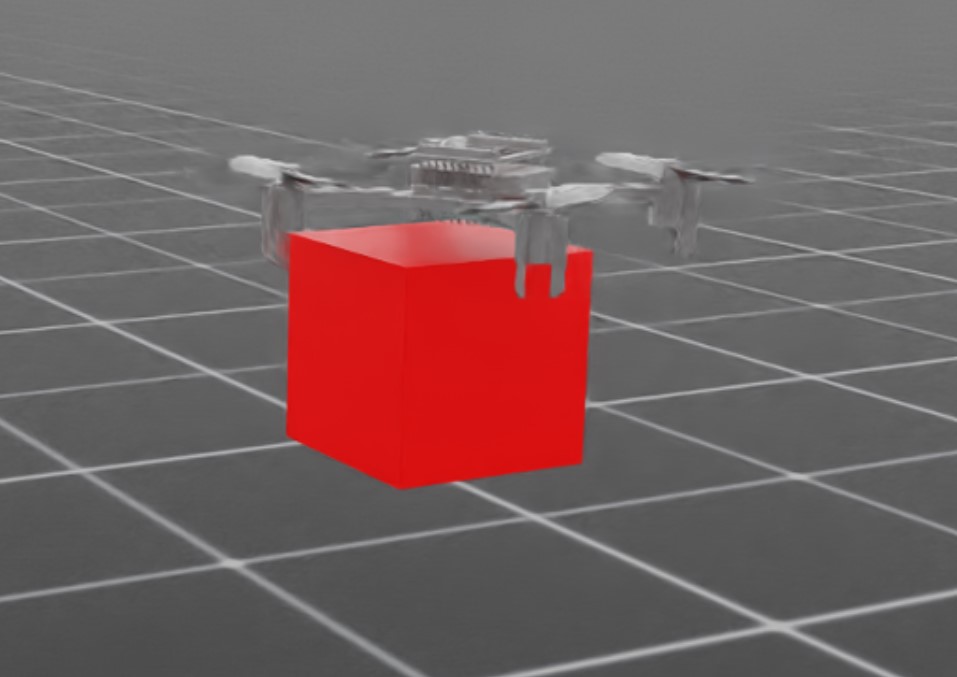
Others#
World |
Environment ID |
Description |
|---|---|---|
|
Fly and hover the Crazyflie copter at a goal point by applying thrust. |
Multi-agent#
Note
True mutli-agent training is only available with the skrl library, see the Multi-Agents Documentation for more information.
It supports the IPPO and MAPPO algorithms, which can be activated by adding the command line input --algorithm IPPO or --algorithm MAPPO to the train/play script.
If these environments are run with other libraries or without the IPPO or MAPPO flags, they will be converted to single-agent environments under the hood.
Classic#
World |
Environment ID |
Description |
|---|---|---|
|
Move the cart and the pendulum to keep the last one upwards in the classic inverted double pendulum on a cart control |
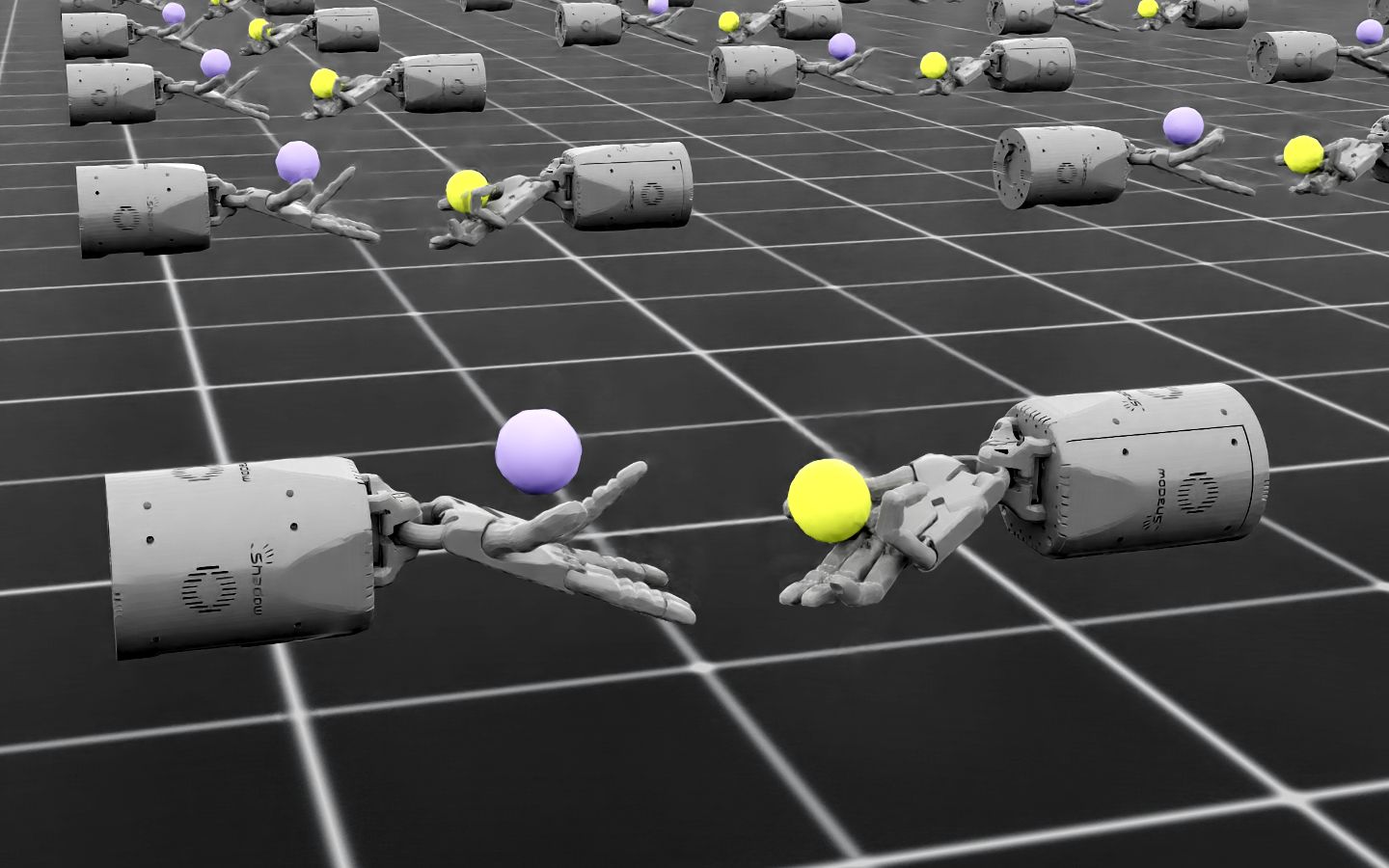
Manipulation#
Environments based on fixed-arm manipulation tasks.
World |
Environment ID |
Description |
|---|---|---|
|
Passing an object from one hand over to the other hand |
Comprehensive List of Environments#
Task Name |
Inference Task Name |
Workflow |
RL Library |
Isaac-Ant-Direct-v0 |
Direct |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
|
Isaac-Ant-v0 |
Manager Based |
rsl_rl (PPO), rl_games (PPO), skrl (PPO), sb3 (PPO) |
|
Isaac-Cart-Double-Pendulum-Direct-v0 |
Direct |
rl_games (PPO), skrl (IPPO, MAPPO, PPO) |
|
Isaac-Cartpole-Depth-Camera-Direct-v0 |
Direct |
rl_games (PPO), skrl (PPO) |
|
Isaac-Cartpole-Direct-v0 |
Direct |
rl_games (PPO), rsl_rl (PPO), skrl (PPO), sb3 (PPO) |
|
Isaac-Cartpole-RGB-Camera-Direct-v0 |
Direct |
rl_games (PPO), skrl (PPO) |
|
Isaac-Cartpole-v0 |
Manager Based |
rl_games (PPO), rsl_rl (PPO), skrl (PPO), sb3 (PPO) |
|
Isaac-Franka-Cabinet-Direct-v0 |
Direct |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
|
Isaac-Humanoid-Direct-v0 |
Direct |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
|
Isaac-Humanoid-v0 |
Manager Based |
rsl_rl (PPO), rl_games (PPO), skrl (PPO), sb3 (PPO) |
|
Isaac-Lift-Cube-Franka-IK-Abs-v0 |
Manager Based |
||
Isaac-Lift-Cube-Franka-IK-Rel-v0 |
Manager Based |
||
Isaac-Lift-Cube-Franka-v0 |
Isaac-Lift-Cube-Franka-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO), rl_games (PPO) |
Isaac-Navigation-Flat-Anymal-C-v0 |
Isaac-Navigation-Flat-Anymal-C-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Open-Drawer-Franka-IK-Abs-v0 |
Manager Based |
||
Isaac-Open-Drawer-Franka-IK-Rel-v0 |
Manager Based |
||
Isaac-Open-Drawer-Franka-v0 |
Isaac-Open-Drawer-Franka-Play-v0 |
Manager Based |
rsl_rl (PPO), rl_games (PPO), skrl (PPO) |
Isaac-Quadcopter-Direct-v0 |
Direct |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
|
Isaac-Reach-Franka-IK-Abs-v0 |
Manager Based |
||
Isaac-Reach-Franka-IK-Rel-v0 |
Manager Based |
||
Isaac-Reach-Franka-v0 |
Isaac-Reach-Franka-Play-v0 |
Manager Based |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
Isaac-Reach-UR10-v0 |
Isaac-Reach-UR10-Play-v0 |
Manager Based |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
Isaac-Repose-Cube-Allegro-Direct-v0 |
Direct |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
|
Isaac-Repose-Cube-Allegro-NoVelObs-v0 |
Isaac-Repose-Cube-Allegro-NoVelObs-Play-v0 |
Manager Based |
rsl_rl (PPO), rl_games (PPO), skrl (PPO) |
Isaac-Repose-Cube-Allegro-v0 |
Isaac-Repose-Cube-Allegro-Play-v0 |
Manager Based |
rsl_rl (PPO), rl_games (PPO), skrl (PPO) |
Isaac-Repose-Cube-Shadow-Direct-v0 |
Direct |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
|
Isaac-Repose-Cube-Shadow-OpenAI-FF-Direct-v0 |
Direct |
rl_games (FF), rsl_rl (PPO), skrl (PPO) |
|
Isaac-Repose-Cube-Shadow-OpenAI-LSTM-Direct-v0 |
Direct |
rl_games (LSTM) |
|
Isaac-Repose-Cube-Shadow-Vision-Direct-v0 |
Isaac-Repose-Cube-Shadow-Vision-Direct-Play-v0 |
Direct |
rsl_rl (PPO), rl_games (VISION) |
Isaac-Shadow-Hand-Over-Direct-v0 |
Direct |
rl_games (PPO), skrl (IPPO, MAPPO, PPO) |
|
Isaac-Velocity-Flat-Anymal-B-v0 |
Isaac-Velocity-Flat-Anymal-B-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Flat-Anymal-C-Direct-v0 |
Direct |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
|
Isaac-Velocity-Flat-Anymal-C-v0 |
Isaac-Velocity-Flat-Anymal-C-Play-v0 |
Manager Based |
rsl_rl (PPO), rl_games (PPO), skrl (PPO) |
Isaac-Velocity-Flat-Anymal-D-v0 |
Isaac-Velocity-Flat-Anymal-D-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
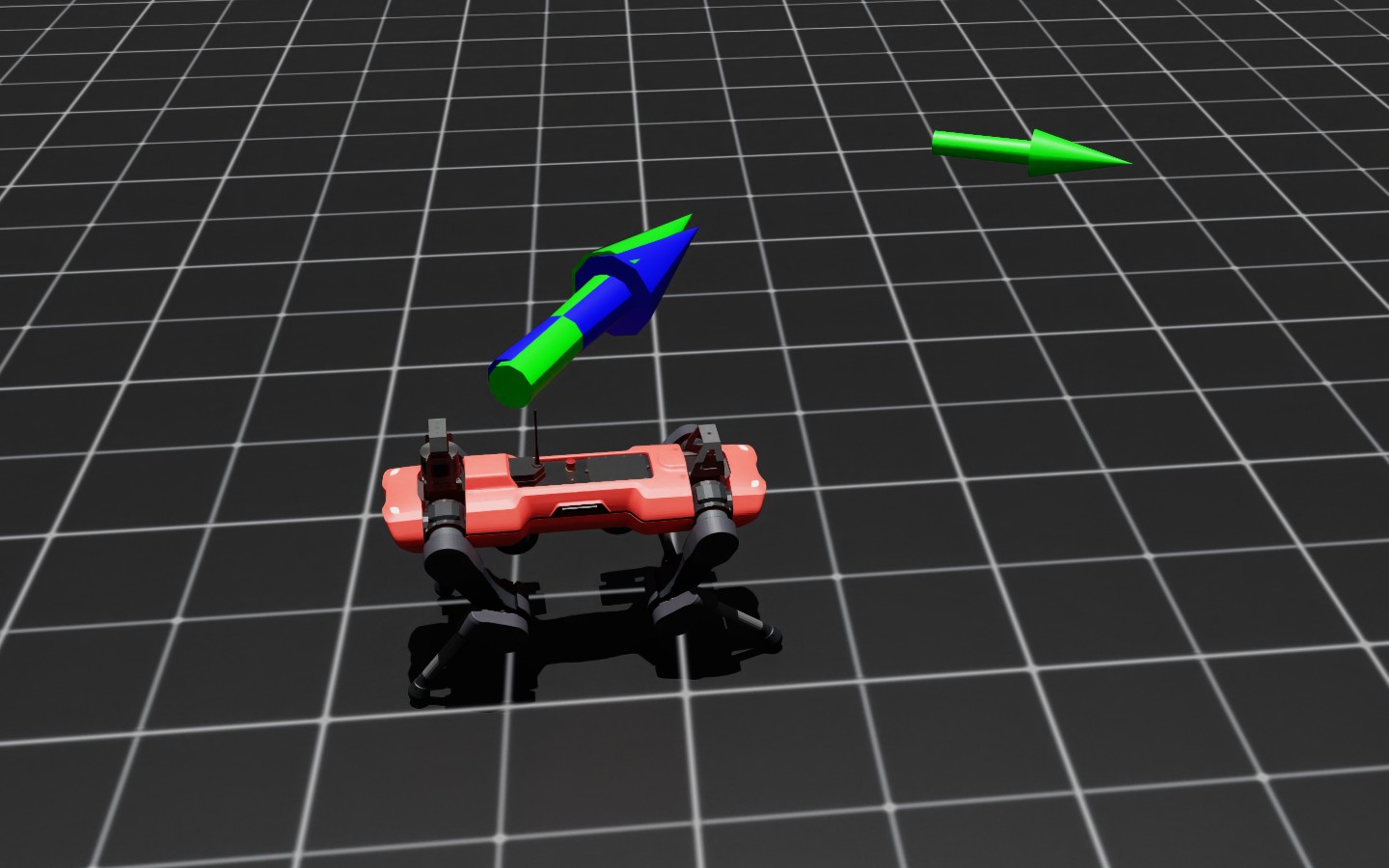
Isaac-Velocity-Flat-Cassie-v0 |
Isaac-Velocity-Flat-Cassie-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Flat-G1-v0 |
Isaac-Velocity-Flat-G1-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Flat-H1-v0 |
Isaac-Velocity-Flat-H1-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Flat-Spot-v0 |
Isaac-Velocity-Flat-Spot-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Flat-Unitree-A1-v0 |
Isaac-Velocity-Flat-Unitree-A1-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Flat-Unitree-Go1-v0 |
Isaac-Velocity-Flat-Unitree-Go1-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Flat-Unitree-Go2-v0 |
Isaac-Velocity-Flat-Unitree-Go2-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Rough-Anymal-B-v0 |
Isaac-Velocity-Rough-Anymal-B-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Rough-Anymal-C-Direct-v0 |
Direct |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
|
Isaac-Velocity-Rough-Anymal-C-v0 |
Isaac-Velocity-Rough-Anymal-C-Play-v0 |
Manager Based |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Rough-Anymal-D-v0 |
Isaac-Velocity-Rough-Anymal-D-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Rough-Cassie-v0 |
Isaac-Velocity-Rough-Cassie-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Rough-G1-v0 |
Isaac-Velocity-Rough-G1-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Rough-H1-v0 |
Isaac-Velocity-Rough-H1-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Rough-Unitree-A1-v0 |
Isaac-Velocity-Rough-Unitree-A1-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Rough-Unitree-Go1-v0 |
Isaac-Velocity-Rough-Unitree-Go1-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Rough-Unitree-Go2-v0 |
Isaac-Velocity-Rough-Unitree-Go2-Play-v0 |
Manager Based |
rsl_rl (PPO), skrl (PPO) |